

第四课 卷积神经网络
第三周 目标检测
3.5 Bound boxing预测
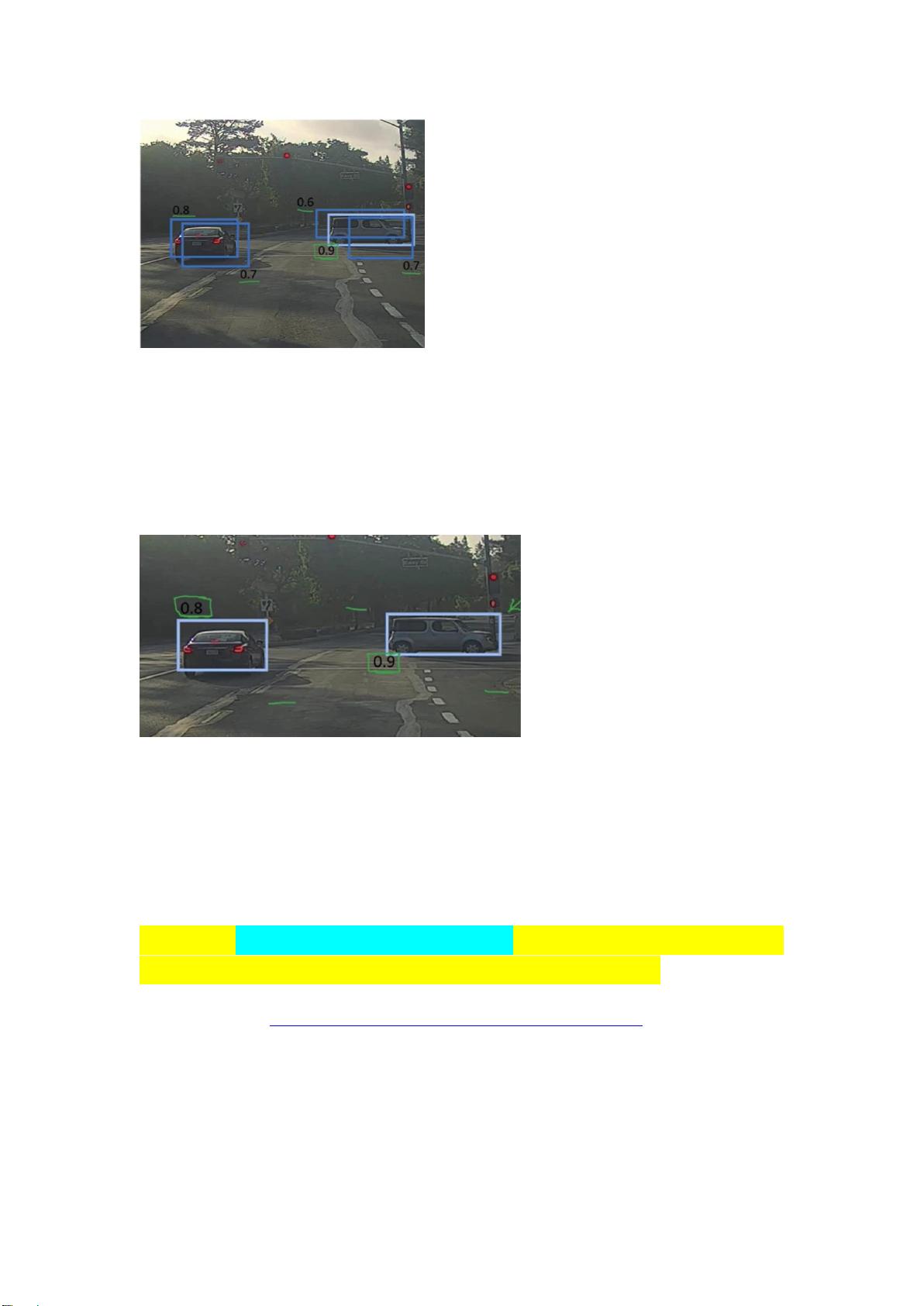
滑动窗口算法有的时候无法识别出整个车体,
------------------------------------------------------------------
此时我们引入
YOLO
算法
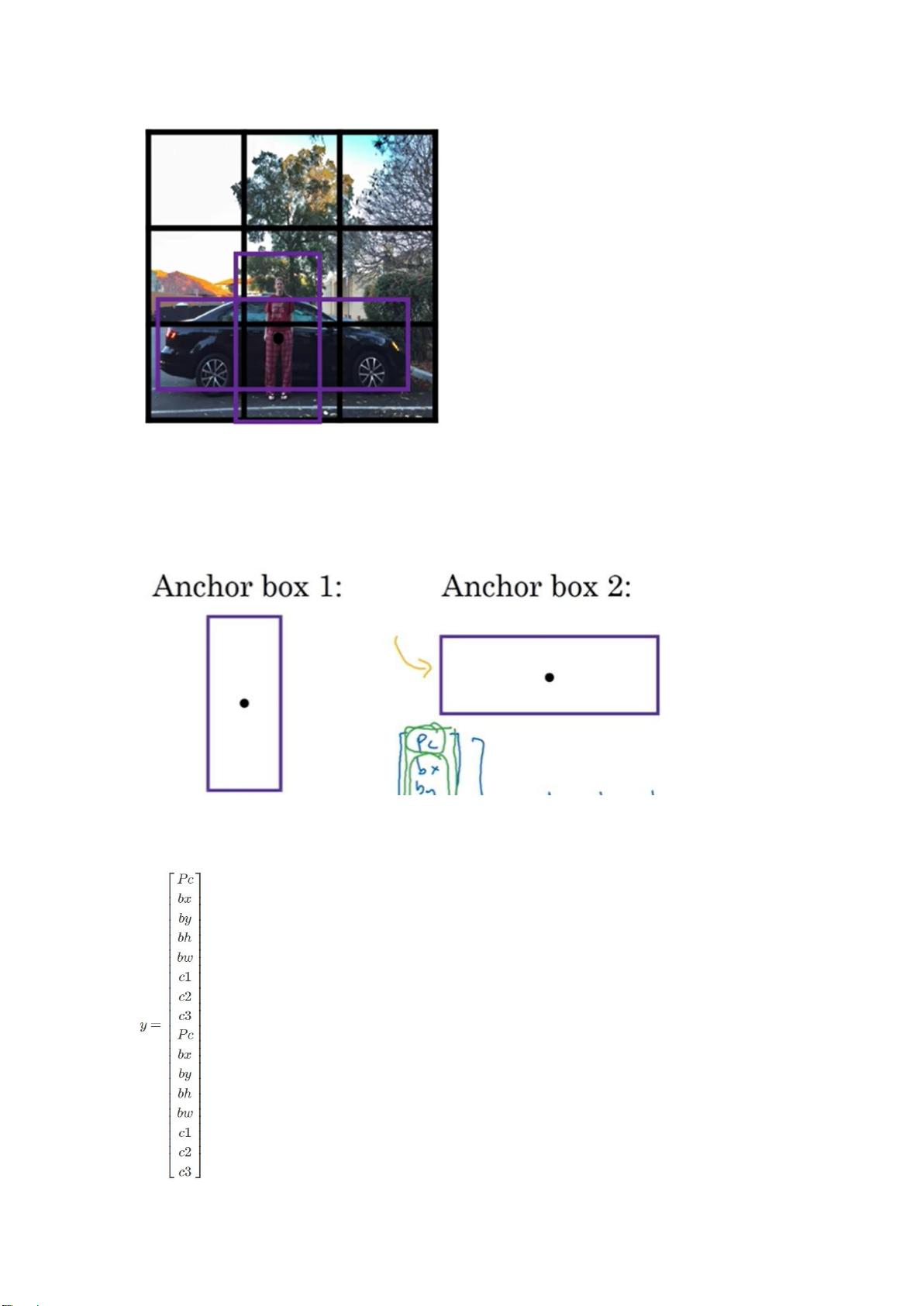
我们会在图像上放置网格
实际上网格会比较多(比如
19*19
)
基本思路:
使用图像定位算法应用于9个框上
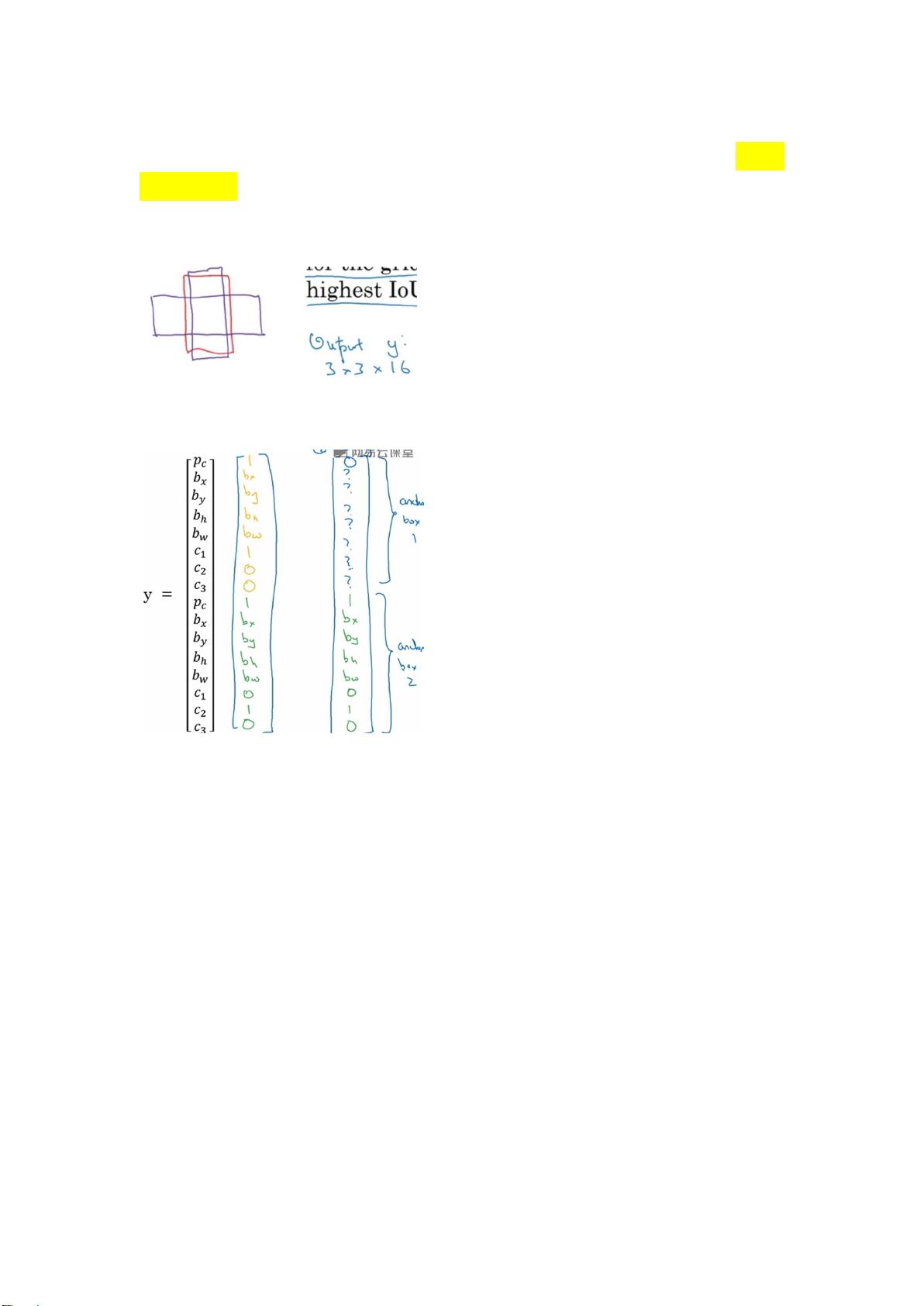
在每个框上都会有一个标签
y
,是一个类似之前的
8
维向量
YOLO
的做法是取对象的中点,将对象放进它的中点所在的格子位置。

剩余26页未读,继续阅读
资源评论


Mike峰
- 粉丝: 119
- 资源: 3









最新资源
- 含分布式电源的基于粒子群算法的配电网重构算法:改进粒子群算法 优化目标:有功网损最小 潮流计算模型:前推回代法 计算模型采用IEEE33节点标准模型 输出结果如下图片所示. 文件含:MATLAB程序
- VMware-Workstation-7.14.zip
- 学籍管理数字化:构建高效管理系统
- 药店药品信息管理系统:用户体验与功能优化
- 防疫志愿者服务:数字化平台的开发与应用
- Unity文件浏览器,打开文件及文件夹
- 自助医疗服务系统:技术框架与数据库设计
- mmexport1735216288562.png
- C# 串口工具源码,仿串口调试工具
- 懒人工具箱1.1.5(大数据、测试等)
- Dockerfile详解与实战:构建高效容器化应用
- Java毕业设计-基于springboot+vue的在线教育平台源码+文档+视频教程
- 一个用于QT源代码统计分析的小工具
- 基于springboot+vue的在线教育平台源码+文档+视频教程
- 巨漂亮的3d圣诞树html
- 巨漂亮的圣诞树飘雪花,动态
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


