系列步进电机驱动器 DL-025 和 DL-025M)、AB 公司的 MicroLogix1500 及与之相
配的 WD990 微机电源,步进电机
1.步进电机:步进电机的角位移θ或线位移 s 与脉冲数 k 成正比,它的转
速 n、或线速度 v 与脉冲频率 f 成正比。在负载能力范围内这些关系不因电源电
压、负载大小、环境条件的波动而变化。因而适用于开环系统中作执行元件,使
控制系统大为简化。步进电机可以在很宽的范围内通过改变脉冲频率来调速;能
够快速启动、反转和制动。它不需要变换能直接将数字脉冲信号转换为角位移,
很适合微型计算机控制。这正是在这次实验中我们采用步进电机作为执行元件的
主要原因。
步进电机按励磁方式分类,可分为反应式、永磁式和感应子式。本次实验采
用的是永磁式两相步进电机,采用两相四拍工作制,即采用
AB,CD-BA,CD-BA,DC-AB,DC-AB,CD……的通电方式,其中 AB 表示 A 为正,B 为负,
其他类推。
当 AB 两相通电时,产生了沿 AB 两相对称线方向的磁通,由于磁通力图通过
磁阻最小的路径,因而使转子受到反应转矩的作用而转动,知道转子齿轴线和定
子磁极上对应的齿轴线对齐为止。因为转子共有 50 个齿,每个齿矩角为 7.2 度,
定子一个极距所占的齿数为 6.25,不是整数,因此当一相对齐时,相邻两对磁
极下的齿和转子必然错开四分之一转矩角,即 1.8 度。断开 AB,接通 BC,这时
磁通沿 BC 相的对称线方向,同样在反应转矩的作用下,转
子转过 1.8 度。依此类推,控制绕组按 AB,CD-BA,CD-BA,DC-AB,DC-AB,CD……顺
序通电时,转子便按顺时针方向一步一步连续的转动起来。每换接一次绕组,转
子转过 0.25 转矩角。如果要使步进电机反转,那么只要将励磁线圈两端电压极
性改变,即按 AB,CD-AB,DC-BA,DC-BA,CD-AB,CD……顺序循环通电时,则转子便
反向运转起来。
根据工作原理,归纳步进电机的工作原理如下:
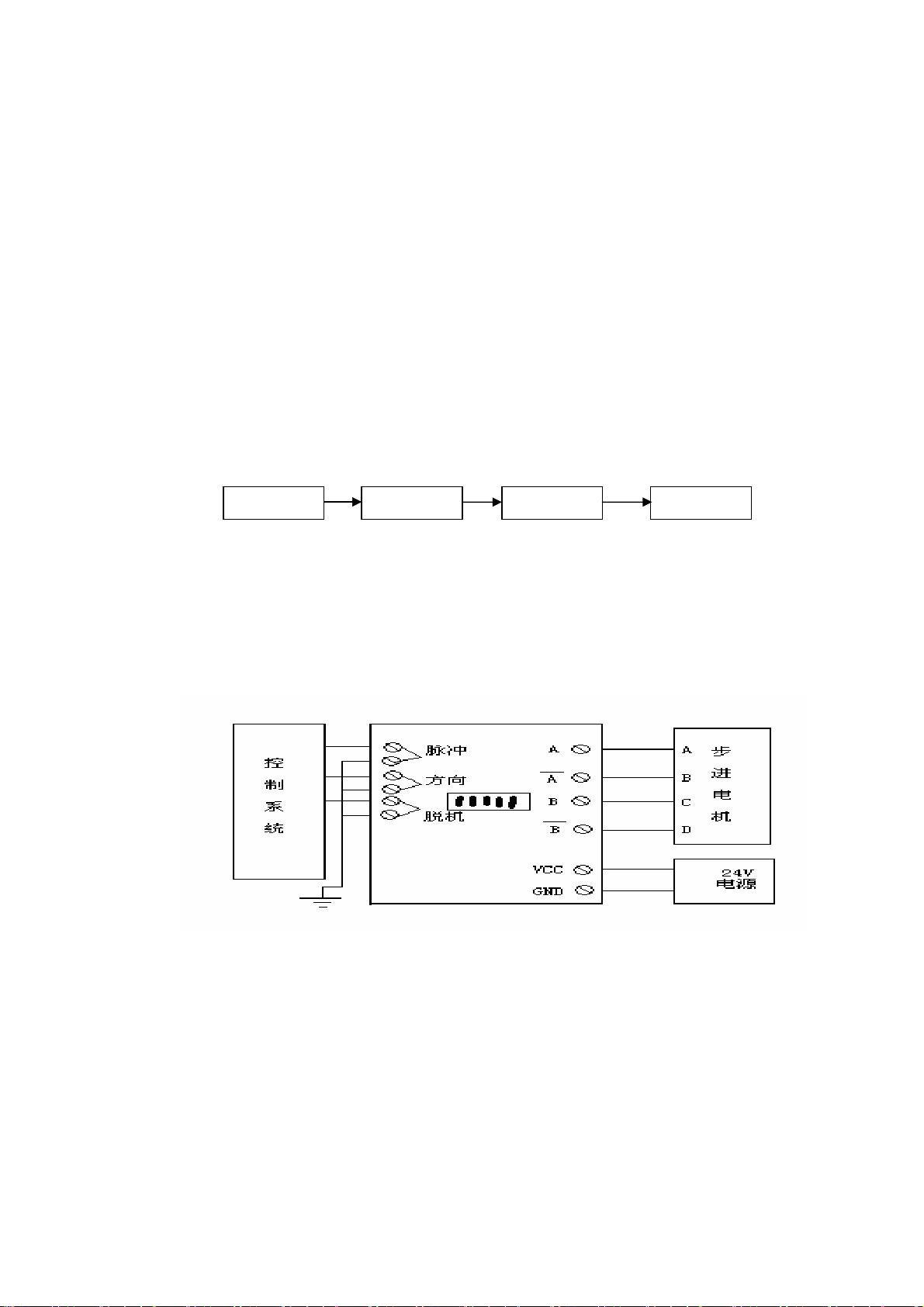
(1) 步进电机工作时,每相绕组由专门驱动电源通过“环形分配器”按
一定规律轮流通电。
(2) 每输入一个脉冲电信号转子转过的角度称为步距角。
(3) 步进电机可以按特定指令进行角度控制,也可以进行速度控制。