**影像识别—混淆矩阵**
混淆矩阵是遥感和图像处理领域中评估分类性能的重要工具,特别是在ENVI(Environment for Visualizing Images)这样的遥感影像处理软件中。它用于量化分类算法的准确性,通过比较实际(真值)和预测(分类结果)的类别归属来分析错误类型。混淆矩阵通常包含真实类别的行和预测类别的列,每一单元格表示对应类别的预测正确或错误的像元数量。
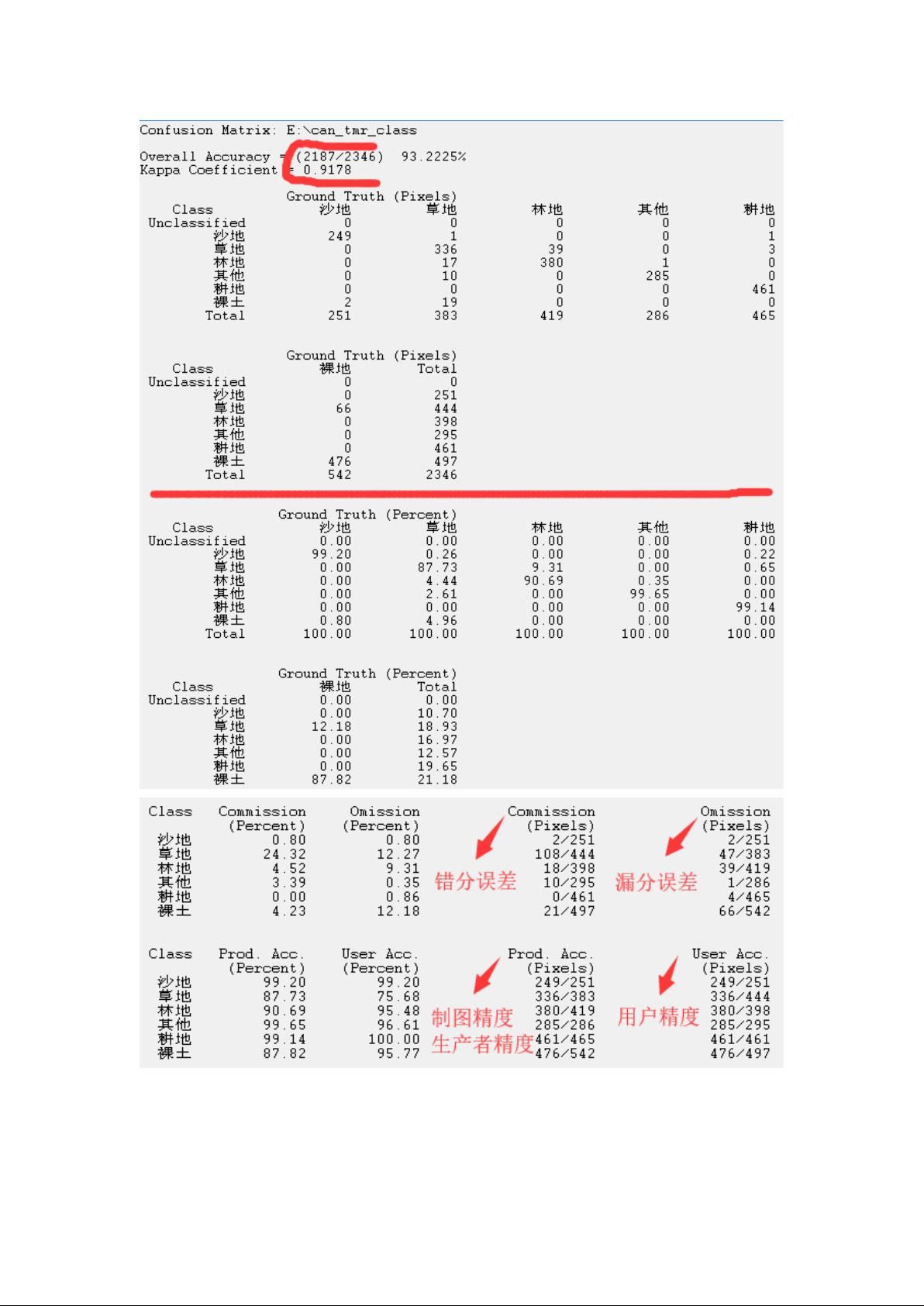
在提供的表格中,我们可以看到不同地物类型的混淆矩阵。例如,沙地、草地、林地、其他、耕地和裸地是主要的地物类别。矩阵的第一行和第一列分别代表真实类别和预测类别,而对角线上的数字表示被正确分类的像元数量。非对角线上的数字则表示分类错误的情况,即某个类别的像元被错误地分到了其他类别。
**混淆矩阵的关键指标:**
1. **总体精度(Overall Accuracy)**:总体精度是所有样本中被正确分类的样本比例,计算公式为正确分类的像元总数除以总的像元数。在给定的例子中,这是通过计算对角线上的元素总和并除以总和得到的。
2. **Kappa 精度**:Kappa系数是一种统计量,用来衡量分类的精度,它考虑了分类纯随机正确率的影响,其值范围在0到1之间,1表示完美分类,0表示随机分类。当Kappa系数大于0.4时,通常认为分类效果较好。
3. **生产者精度(Producer's Accuracy)**:生产者精度是指某一类别被正确分类的像元占该类别所有像元的比例,也就是对应类别的对角线元素除以其列的总和。
4. **用户精度(User's Accuracy)**:用户精度是指被正确识别为某一类别的像元占所有被分类为该类的像元的比例,即对应类别的对角线元素除以其行的总和。
混淆矩阵中的这些指标可以帮助我们理解分类算法在各个类别上的表现,以及整体分类效果。例如,在提供的示例中,沙地的用户精度和生产者精度都很高,表明沙地的分类效果很好;而草地的生产者精度较低,可能意味着部分草地被错误地分类为其他类别。
此外,还可以通过混淆矩阵计算其他精度指标,如F1分数、查准率、查全率等,以更全面地评估分类效果。在实际应用中,这些指标对于调整分类算法参数、优化模型性能以及提高遥感影像解译的可靠性至关重要。







评论0
最新资源