
1 总述
1.1 什么是 caltech-lane-detection?
caltech-lane-detection 是由加州理工学院提出的一种实时方法来检测城市街道中的
车道标志。它基于生成道路的俯视图,使用选择性定向高斯滤波器进行滤波,通过 RANSAC
算法进行直线拟合,提出一种新的快速 RANSAC 算法进行初始猜测,以拟合贝塞尔样条曲线,
然后进行后处理步骤。该算法可以在不同条件下检测街道静态图像中的所有车道,同时以 50
赫兹的速率运行,并取得很不错的效果。算法可以检测道路上所有的车道线,或者当前车道
的两个车道标记。
1.2 caltech-lane-detection 编写背景
每年由很多人死于车祸,而其中大部分是因为驾驶员的疏忽造成的。同时,每天个人出
行量的大幅增长增加了对现有的交通系统的压力。因此自动驾驶这项技术是十分重要的,而
车道检测是一项有用的技术,自 20 世纪 80 年代中期以来受到了相当多的关注。相比于一些
容易的车道线检测,城市的车道线检测更为复杂,且难度较大。在这个背景下,caltech-lane-
detection 的编写者提出了一种简单、快速、健壮和有效的方法来解决这个问题。
1.3 caltech-lane-detection 整体流程
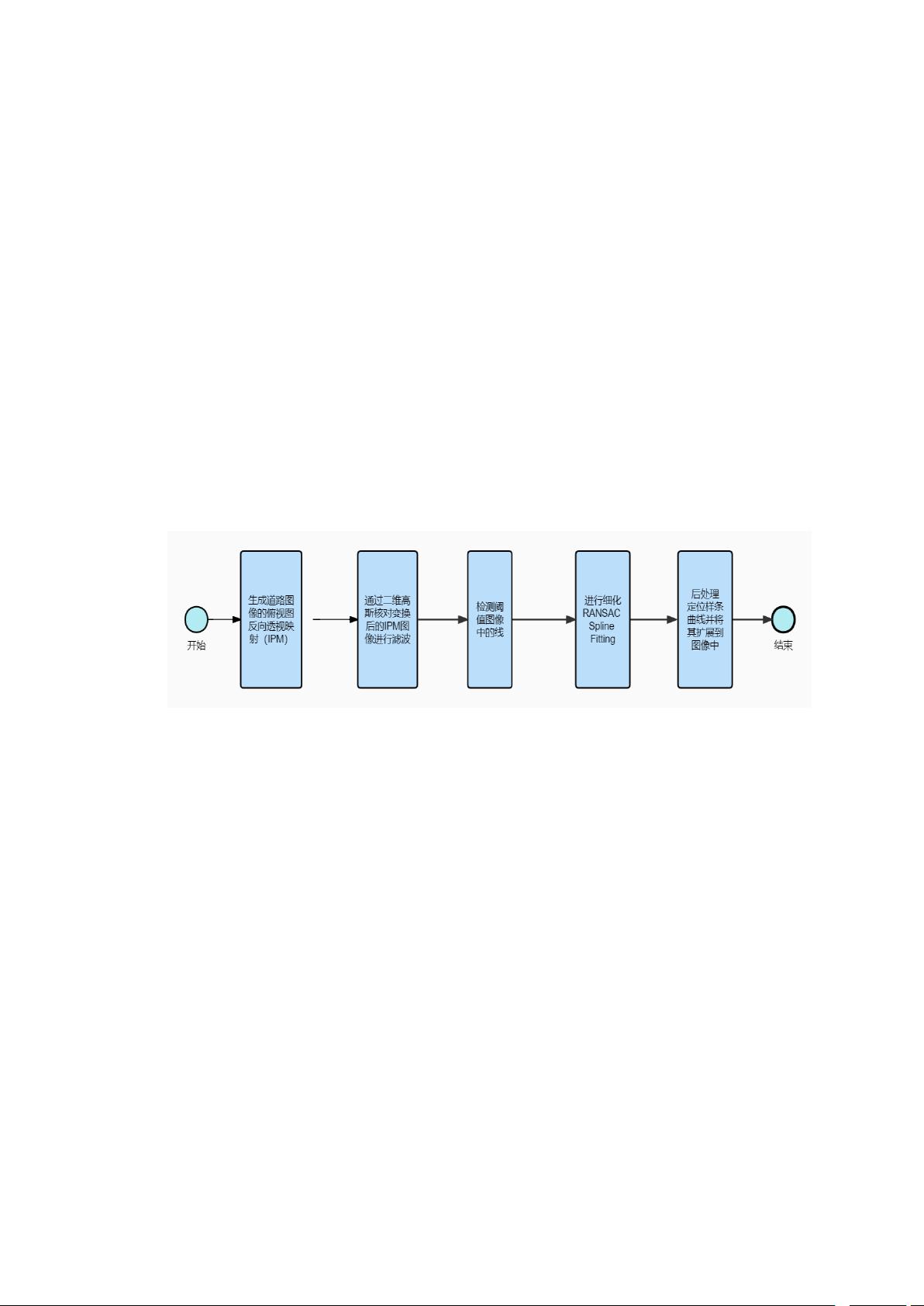
图 1.1 算法整体流程
caltech-lane-detection 首先通过 IPM 变换生成道路图像的俯视图,这样可以消除图像
中的透视效果,使看起来在地平线处汇聚的车道变成垂直和平行的。并且,通过 IPM 变换可
以只关注输入图像的一个子区域,这有助于大大缩短运行时间。然后对图像进行过滤和阈值。
从而得到一个二值化的图像,方便后面运算。接下来就可以检测图像中的线了,使用霍夫变
换的简化版本来计算图像中有多少条线,然后使用 RANSAC 来稳健地拟合这些线。通过该步
骤就可以得到候选线了。对于候选线进行细化,再经过后处理,将 IPM 转换后的图像中找到
的线映射到原图中。至此就可以实现车道线的检测了。其算法的整体流程如图 1.1 所示
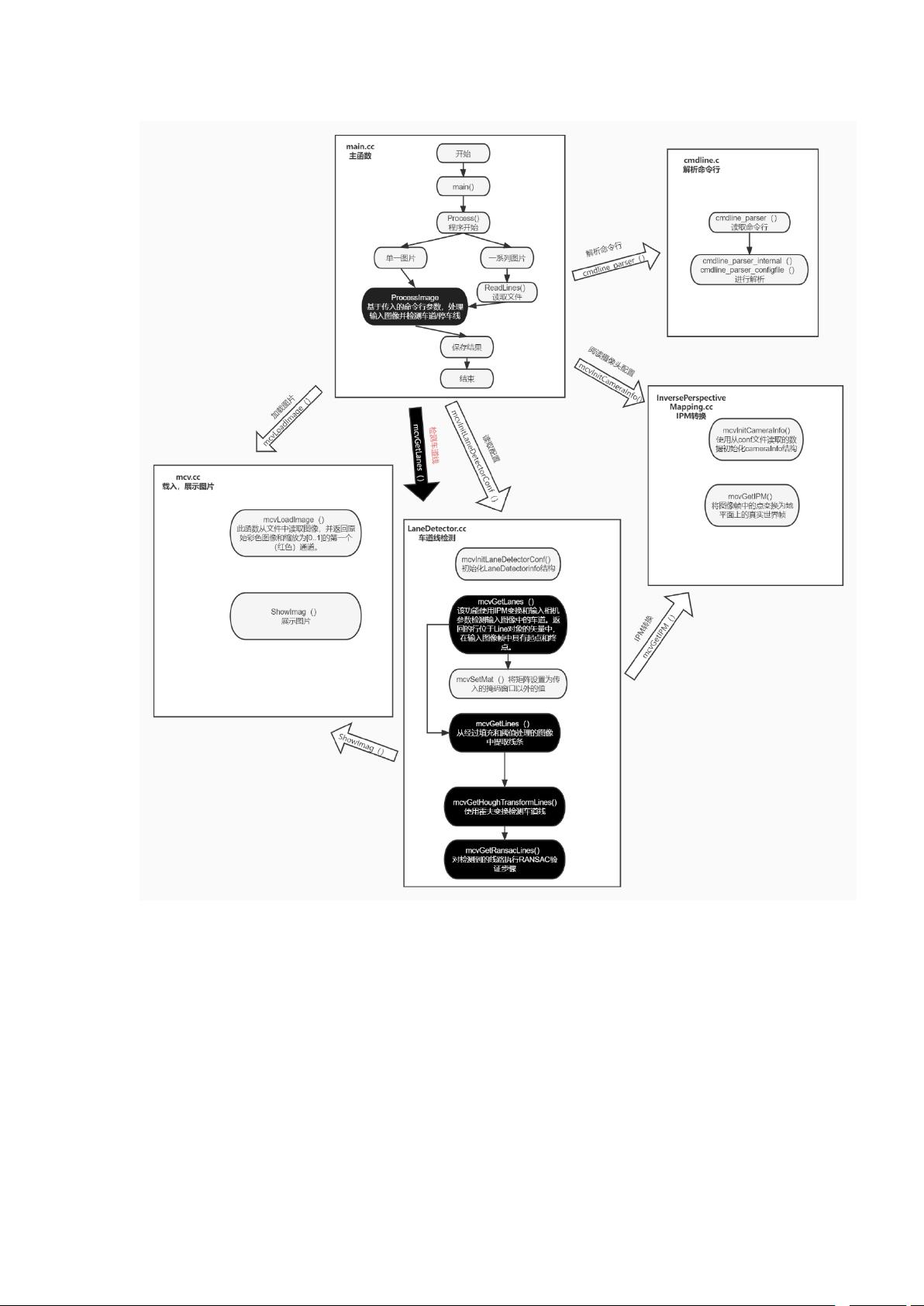
其代码的整体流程如图 1.2 所示。图中并未对每个函数进行表示,只选择了其中比较重
要的函数进行了流程显示。代码主要编写在五个 cpp 中,其中 main.cc 是代码的主函数,是
代码的开始,其中 ProcessImage()函数通过传入的命令行参数,处理输入图像并检测车
道/停车线。该函数调用了其他 cpp 文件中的方法。LaneDetector.cc 是车道线检测代码的
部分,对车道线进行检测,是该算法的主要部分。cmdline.c 是用来解析命令行的,通过对
命令行的解析,读取具体指令。InversePerspectiveMapping.cc 实现了 IPM 转换,将道路
图像转换为俯视图,为 LaneDetector 进行车道线检测提供基础。mcv.cc 载入,展示图片,
辅助读取,同时也对算法产生的结果进行展示。下图清晰的展示出各个文件之间的关系,也
对整体流程进行了展示。
剩余11页未读,继续阅读
资源评论













