
Point Feature Extraction on 3D Range Scans
Taking into Account Object Boundaries
Bastian Steder Radu Bogdan Rusu Kurt Konolige Wolfram Burgard
Abstract— In this paper we address the topic of feature ex-
traction in 3D point cloud data for object recognition and pose
identification. We present a novel interest keypoint extraction
method that operates on range images generated from arbitrary
3D point clouds, which explicitly considers the borders of
the objects identified by transitions from foreground to back-
ground. We furthermore present a feature descriptor that takes
the same information into account. We have implemented our
approach and present rigorous experiments in which we analyze
the individual components with respect to their repeatability
and matching capabilities and evaluate the usefulness for point
feature based object detection methods.
I. INTRODUCTION
In object recognition or mapping applications, the ability
to find similar parts in different sets of sensor readings is
a highly relevant problem. A popular method is to estimate
features that best describe a chunk of data in a compressed
representation and that can be used to efficiently perform
comparisons between different data regions. In 2D or 3D
perception, such features are usually local around a point
in the sense that for a given point in the scene its vicinity
is used to determine the corresponding feature. The entire
task is typically subdivided into two subtasks, namely the
identification of appropriate points, often referred to as
interest points or key points, and the way in which the
information in the vicinity of that point is encoded in a
descriptor or description vector.
Important advantages of interest points are that they
substantially reduce the search space and computation time
required for finding correspondences between two scenes and
that they furthermore focus the computation on areas that are
more likely relevant for the matching process. There has been
surprisingly little research for interest point extraction in raw
3D data in the past, compared to vision, where this is a well
researched area. Most papers about 3D features target only
the descriptor.
In this paper we focus on single range scans, as obtained
with 3D laser range finders or stereo cameras, where the
data is incomplete and dependent on a viewpoint. We chose
range images as the way to represent the data since they
reflect this situation and enable us to borrow ideas from the
vision sector.
We present the normal aligned radial feature (NARF), a
novel interest point extraction method together with a feature
descriptor for points in 3D range data. The interest point
B. Steder and W. Burgard are with the Dept. of Computer Science
of the University of Freiburg, Germany. {steder,burgard}@informatik.uni-
freiburg.de; R. Rusu and K. Konolige are with Willow Garage Inc., USA.
{rusu,konolige}@willowgarage.com
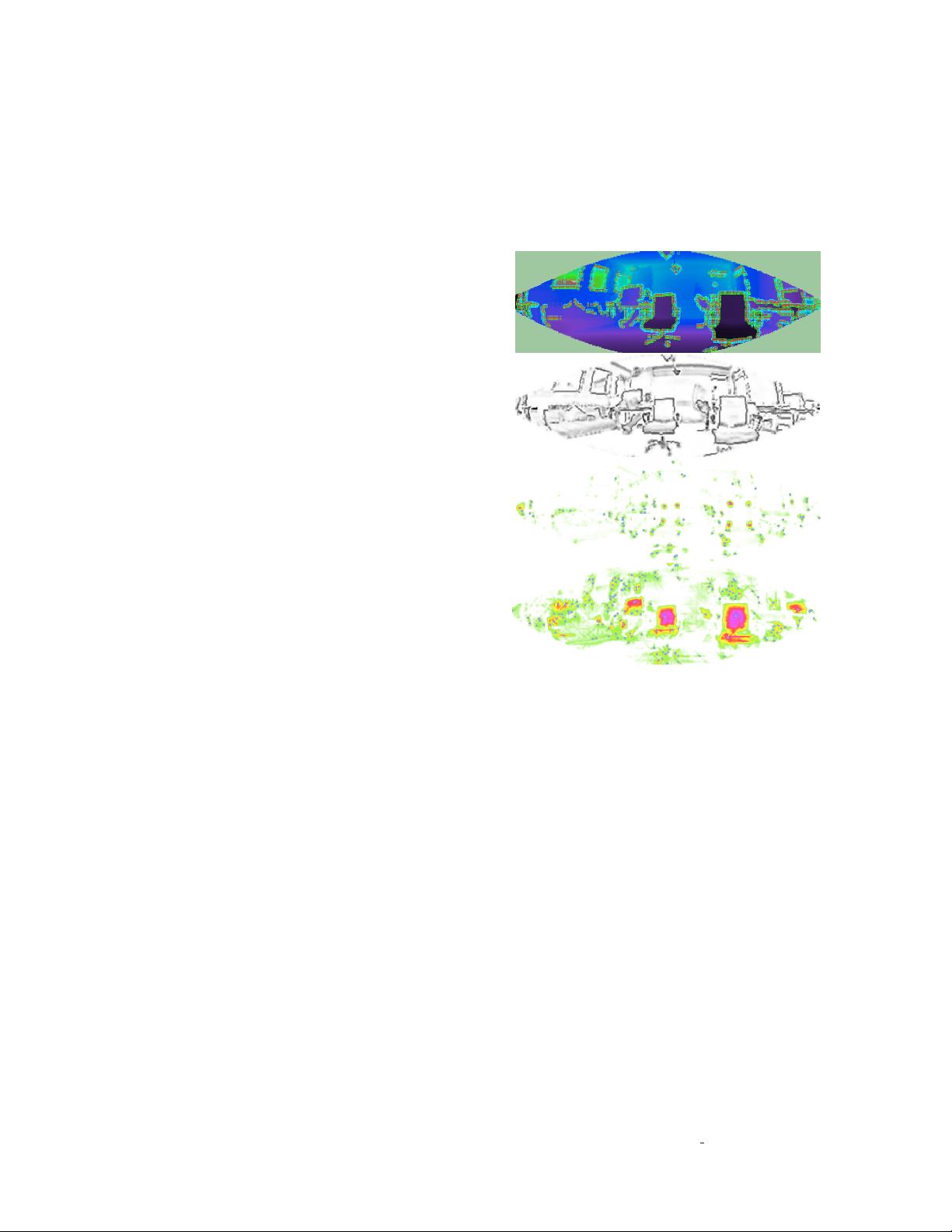
(a)
(b)
(c)
(d)
Fig. 1. The interest point extraction procedure. (a) Range image of an
office scene with two chairs in the front with the extracted borders marked.
(b) Surface change scores according to borders and principle curvature. (c)
Interest values with marked interest points for a support size of 20cm. Note
how the corners of the chairs are detected as interest points at this scale. (d)
Interest values with marked interest points for a support size of 1m. Note
how, compared to (c), the whole surface of the chair’s backrests contain one
interest point at this scale.
extraction method has been designed with two specific goals
in mind: i) the selected points are supposed to be in positions
where the surface is stable (to ensure a robust estimation
of the normal) and where there are sufficient changes in
the immediate vicinity; ii) since we focus on partial views,
we want to make use of object borders, meaning the outer
shapes of objects seen from a certain perspective. The outer
forms are often rather unique so that their explicit use in the
interest point extraction and the descriptor calculation can be
expected to make the overall process more robust. For this
purpose, we also present a method to extract those borders.
To the best of our knowledge, no existing method for feature
extraction tackles all of these issues.
Figure 1 shows an outline of our interest point extraction
procedure. The implementation of our method is available
under an open-source license
1
.
1
The complete source code including instructions about
running the experiments presented in this paper can be found at
http://www.ros.org/wiki/Papers/ICRA2011
Steder
剩余7页未读,继续阅读
资源评论


Upupup6
- 粉丝: 1886
- 资源: 35









最新资源
- 圆薄片自动装配设备sw20可编辑全套技术资料100%好用.zip
- 重型龙门CNC加工中心sw12全套技术资料100%好用.zip
- Analytics-90Day-2024-12-26-134101.000.ips.ca.synced
- 竹筷自动计数大袋包装封装输送设备sw16可编辑全套技术资料100%好用.zip
- 竹筷自动包装机sw16可编辑全套技术资料100%好用.zip
- 自动车钢管机(sw19可编辑+工程图)全套技术资料100%好用.zip
- 自动化球阀切割机(sw19可编辑+工程图)全套技术资料100%好用.zip
- 麒麟系统部署服务!!!!!!
- 自动剥离高精度贴膜机sw18可编辑全套技术资料100%好用.zip
- 自动化贴标机料卷送料拨料机 sw18可编辑全套技术资料100%好用.zip
- 自动化上下料烫金印刷机sw16可编辑全套技术资料100%好用.zip
- 自动化衣架除水口插针钩一体机sw17可编辑全套技术资料100%好用.zip
- 自动双轴包胶机sw18可编辑全套技术资料100%好用.zip
- 自动矫正叠料装盒机sw12全套技术资料100%好用.zip
- 自动上纸吸尘上料机圆盘烫印机sw16可编辑全套技术资料100%好用.zip
- 自动丝印机sw12可编辑全套技术资料100%好用.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


