
A Distributional Perspective on Reinforcement Learning
Marc G. Bellemare
* 1
Will Dabney
* 1
R
´
emi Munos
1
Abstract
In this paper we argue for the fundamental impor-
tance of the value distribution: the distribution
of the random return received by a reinforcement
learning agent. This is in contrast to the com-
mon approach to reinforcement learning which
models the expectation of this return, or value.
Although there is an established body of liter-
ature studying the value distribution, thus far it
has always been used for a specific purpose such
as implementing risk-aware behaviour. We begin
with theoretical results in both the policy eval-
uation and control settings, exposing a signifi-
cant distributional instability in the latter. We
then use the distributional perspective to design
a new algorithm which applies Bellman’s equa-
tion to the learning of approximate value distri-
butions. We evaluate our algorithm using the
suite of games from the Arcade Learning En-
vironment. We obtain both state-of-the-art re-
sults and anecdotal evidence demonstrating the
importance of the value distribution in approxi-
mate reinforcement learning. Finally, we com-
bine theoretical and empirical evidence to high-
light the ways in which the value distribution im-
pacts learning in the approximate setting.
1. Introduction
One of the major tenets of reinforcement learning states
that, when not otherwise constrained in its behaviour, an
agent should aim to maximize its expected utility Q, or
value (Sutton & Barto, 1998). Bellman’s equation succintly
describes this value in terms of the expected reward and ex-
pected outcome of the random transition (x, a) →(X
0
, A
0
):
Q(x, a) = E R(x, a) + γ E Q(X
0
, A
0
).
In this paper, we aim to go beyond the notion of value and
argue in favour of a distributional perspective on reinforce-
*
Equal contribution
1
DeepMind, London, UK. Correspon-
dence to: Marc G. Bellemare <bellemare@google.com>.
Proceedings of the 34
th
International Conference on Machine
Learning, Sydney, Australia, PMLR 70, 2017. Copyright 2017
by the author(s).
ment learning. Specifically, the main object of our study is
the random return Z whose expectation is the value Q. This
random return is also described by a recursive equation, but
one of a distributional nature:
Z(x, a)
D
= R(x, a) + γZ(X
0
, A
0
).
The distributional Bellman equation states that the distribu-
tion of Z is characterized by the interaction of three random
variables: the reward R, the next state-action (X
0
, A
0
), and
its random return Z(X
0
, A
0
). By analogy with the well-
known case, we call this quantity the value distribution.
Although the distributional perspective is almost as old
as Bellman’s equation itself (Jaquette, 1973; Sobel, 1982;
White, 1988), in reinforcement learning it has thus far been
subordinated to specific purposes: to model parametric un-
certainty (Dearden et al., 1998), to design risk-sensitive al-
gorithms (Morimura et al., 2010b;a), or for theoretical anal-
ysis (Azar et al., 2012; Lattimore & Hutter, 2012). By con-
trast, we believe the value distribution has a central role to
play in reinforcement learning.
Contraction of the policy evaluation Bellman operator.
Basing ourselves on results by R
¨
osler (1992) we show that,
for a fixed policy, the Bellman operator over value distribu-
tions is a contraction in a maximal form of the Wasserstein
(also called Kantorovich or Mallows) metric. Our partic-
ular choice of metric matters: the same operator is not a
contraction in total variation, Kullback-Leibler divergence,
or Kolmogorov distance.
Instability in the control setting. We will demonstrate an
instability in the distributional version of Bellman’s opti-
mality equation, in contrast to the policy evaluation case.
Specifically, although the optimality operator is a contrac-
tion in expected value (matching the usual optimality re-
sult), it is not a contraction in any metric over distributions.
These results provide evidence in favour of learning algo-
rithms that model the effects of nonstationary policies.
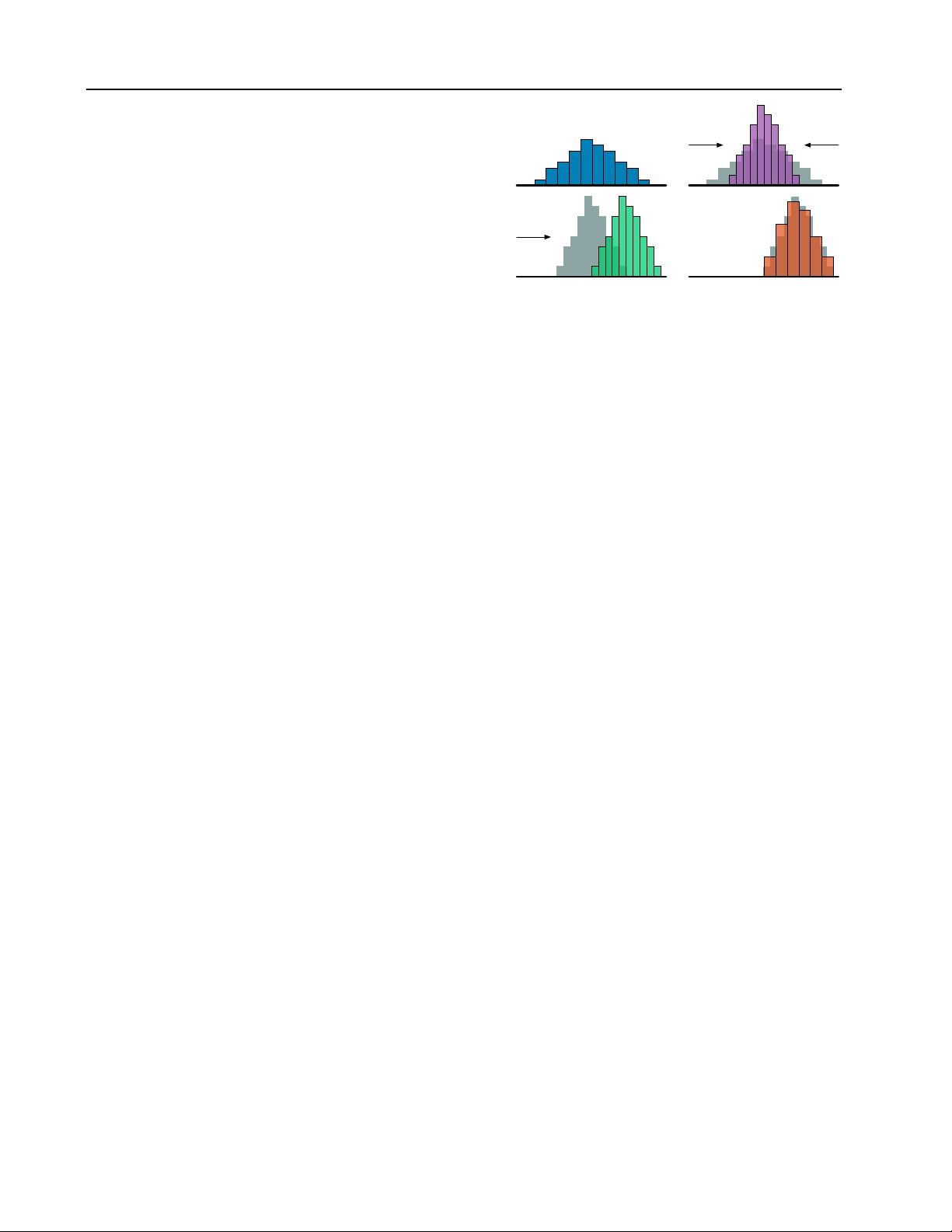
Better approximations. From an algorithmic standpoint,
there are many benefits to learning an approximate distribu-
tion rather than its approximate expectation. The distribu-
tional Bellman operator preserves multimodality in value
distributions, which we believe leads to more stable learn-
ing. Approximating the full distribution also mitigates the
effects of learning from a nonstationary policy. As a whole,
arXiv:1707.06887v1 [cs.LG] 21 Jul 2017

剩余18页未读,继续阅读
资源评论


GanD.GanD
- 粉丝: 3
- 资源: 90









最新资源
- 饥饿游戏搜索HGS算法结合BP建立多特征输入单变量预测模型,Matlab实现,可应用于学术研究及快速数据拟合预测,饥饿游戏搜索HGS算法结合BP建立多特征输入单变量输出拟合预测模型的设计与实现-基于
- 基于多时间尺度滚动优化的多能源微网双层调度策略实现与模型求解,基于多时间尺度滚动优化的多能源微网双层调度策略实现与模型求解,MATLAB代码:基于多时间尺度滚动优化的多能源微网双层调度模型 关键词:多
- MATLAB P文件到M文件的解码转换与编辑操作指南,Matlab P文件解密并转换为可查看编辑的M源码文件,Matlab p文件 转为m文件MATLAB matlab pcode,matlab p
- 基于Python的活动管理系统基础教程
- 基于MATLAB R2021b运行环境,利用双树复小波变换(DTCWT)进行轴承故障诊断研究:精细的方向选择与低冗余度分析 ,基于MATLAB R2021b环境的双树复小波变换(DTCWT)在轴承故障
- 多孔介质多相流中的水驱油模型与达西两相流模型的COMSOL模拟研究,基于多孔介质多相流的水驱油模型与达西两相流模型的COMSOL模拟研究,多孔介质多相流,水驱油模型,达西两相流模型comsol ,多孔
- Matlab麻雀搜索算法(SSA)优化BP神经网络权值与阈值-数据代码全包仿真图形生成器,Matlab麻雀搜索算法(SSA)优化BP神经网络权值与阈值-数据代码全包仿真图形生成器,matlab麻雀
- 基于LSTM神经网络和Adam优化器的短期负荷预测MATLAB程序:利用多因素影响数据训练模型并精准预测未来负荷,基于LSTM神经网络和Adam优化器的短期负荷预测MATLAB程序:利用多因素影响数据
- (源码)基于Arduino的炸弹拆除机器人.zip
- STM32全桥逆变电路原理图:IR2110驱动IRF540N MOS,最大50V直流输入,高交流利用率,谐波低于0.6%,SPWM波形学习好选择,STM32全桥逆变电路原理图:IR2110驱动IRF5
- (源码)基于FUSE框架的简单文件系统.zip
- MATLAB环境下Ricker小波及其频率切片小波变换的代码实现与应用研究,Ricker小波与频率切片小波变换:MATLAB环境下的应用与选择策略,Ricker小波及其频率切片小波变 代码运行环境为M
- (源码)基于Go语言的图书管理系统与并发任务调度系统.zip
- PLC全自动洗衣机控制系统的设计与实现:从硬件选型到软件流程图解析,基于PLC的全自动洗衣机控制系统设计详解含硬件和软件设计章节一套完整方案文档 ,基于PLC全自动洗衣机控制系统设计 含Word文档一
- (源码)基于机械臂的自动咖啡分配器系统.zip
- (源码)基于AVR微控制器的手势感应迷你钢琴.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


