
A Discriminatively Trained, Multiscale, Deformable Part Model
Pedro Felzenszwalb
University of Chicago
pff@cs.uchicago.edu
David McAllester
Toyota Technological Institute at Chicago
mcallester@tti-c.org
Deva Ramanan
TTI-C and UC Irvine
dramanan@ics.uci.edu
Abstract
This paper describes a discriminatively trained, multi-
scale, deformable part model for object detection. Our sys-
tem achieves a two-fold improvement in average precision
over the best performance in the 2006 PASCAL person de-
tection challenge. It also outperforms the best results in the
2007 challenge in ten out of twenty categories. The system
relies heavily on deformable parts. While deformable part
models have become quite popular, their value had not been
demonstrated on difficult benchmarks such as the PASCAL
challenge. Our system also relies heavily on new methods
for discriminative training. We combine a margin-sensitive
approach for data mining hard negative examples with a
formalism we call latent SVM. A latent SVM, like a hid-
den CRF, leads to a non-convex training problem. How-
ever, a latent SVM is semi-convex and the training prob-
lem becomes convex once latent information is specified for
the positive examples. We believe that our training meth-
ods will eventually make possible the effective use of more
latent information such as hierarchical (grammar) models
and models involving latent three dimensional pose.
1. Introduction
We consider the problem of detecting and localizing ob-
jects of a generic category, such as people or cars, in static
images. We have developed a new multiscale deformable
part model for solving this problem. The models are trained
using a discriminative procedure that only requires bound-
ing box labels for the positive examples. Using these mod-
els we implemented a detection system that is both highly
efficient and accurate, processing an image in about 2 sec-
onds and achieving recognition rates that are significantly
better than previous systems.
Our system achieves a two-fold improvement in average
precision over the winning system [5] in the 2006 PASCAL
person detection challenge. The system also outperforms
the best results in the 2007 challenge in ten out of twenty
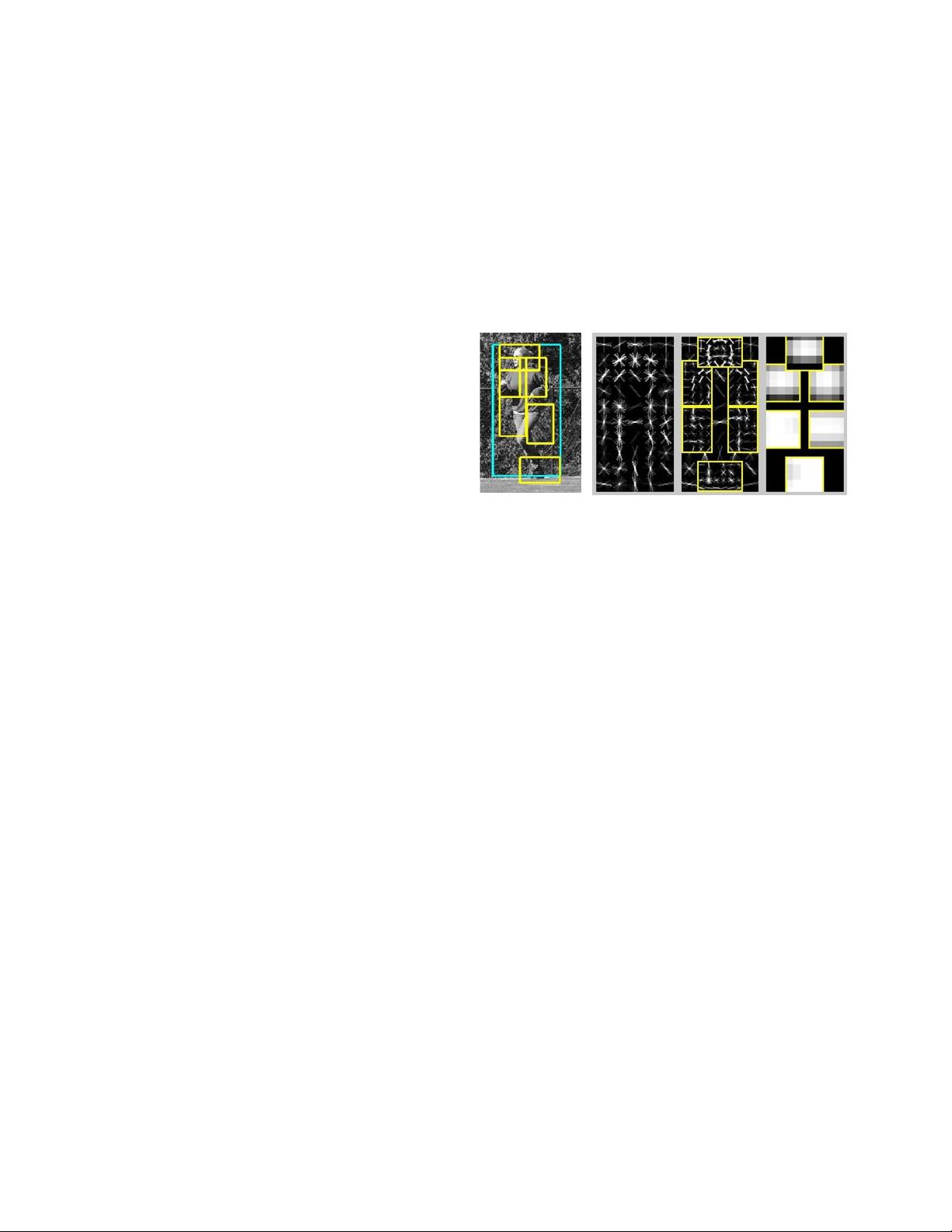
object categories. Figure 1 shows an example detection ob-
tained with our person model.
Figure 1. Example detection obtained with the person model. The
model is defined by a coarse template, several higher resolution
part templates and a spatial model for the location of each part.
The notion that objects can be modeled by parts in a de-
formable configuration provides an elegant framework for
representing object categories [1–3, 6, 10, 12, 13,15,16, 22].
While these models are appealing from a conceptual point
of view, it has been difficult to establish their value in prac-
tice. On difficult datasets, deformable models are often out-
performed by “conceptually weaker” models such as rigid
templates [5] or bag-of-features [23]. One of our main goals
is to address this performance gap.
Our models include both a coarse global template cov-
ering an entire object and higher resolution part templates.
The templates represent histogram of gradient features [5].
As in [14, 19, 21], we train models discriminatively. How-
ever, our system is semi-supervised, trained with a max-
margin framework, and does not rely on feature detection.
We also describe a simple and effective strategy for learn-
ing parts from weakly-labeled data. In contrast to computa-
tionally demanding approaches such as [4], we can learn a
model in 3 hours on a single CPU.
Another contribution of our work is a new methodology
for discriminative training. We generalize SVMs for han-
dling latent variables such as part positions, and introduce a
new method for data mining “hard negative” examples dur-
ing training. We believe that handling partially labeled data
is a significant issue in machine learning for computer vi-
sion. For example, the PASCAL dataset only specifies a
bounding box for each positive example of an object. We
treat the position of each object part as a latent variable. We
1

剩余7页未读,继续阅读
资源评论


luxiankao
- 粉丝: 0
- 资源: 8









最新资源
- 电子版账户历史明细.zip
- Visio 2019 64位版本安装包
- 汽车损坏识别检测数据集,使用yolov11格式标注,6696张图片,可识别11种损坏类型 标签和图片参考:https://backend.blog.csdn.net/article/details/1
- 不同形状物体检测25-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- 数据分析-57-爬取KFC早餐,搭配出你的营养早餐(包含代码和数据)
- 程序员日常小工具,包含截图,接口调用,日期处理,json转换,翻译等
- 如何在Microsoft Visual Studio 2013 编写的程序的详细步骤
- IMG20241229160637.jpg
- java医药管理系统设计源代码.zip
- 汽车损坏识别检测数据集,使用yolov9格式标注,6696张图片,可识别11种损坏类型 标签和图片参考:https://backend.blog.csdn.net/article/details/1
- 汽车损坏识别检测数据集,使用yolov8格式标注,6696张图片,可识别11种损坏类型 标签和图片参考:https://backend.blog.csdn.net/article/details/1
- 远端桌面工具 2024最新版Setup.RemoteDesktopManager.2024.3.22.0
- 基于python的疫情数据爬虫+微博关键词爬虫(数据库)+数据预处理及可视化数据情感分析源码+文档说明
- 基于ssm的大学生心理健康系统设计与开发源码(java毕业设计完整源码+LW).zip
- idea 用了多年的settings
- RationalDMIS64全套教程
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


