ArduRover2.5使用手册
需积分: 50 85 浏览量
2017-12-11
20:58:03
上传
评论 3
收藏 1.38MB PDF 举报


[萝莉电子] - 淘宝搜索 ArduRover
ArduRover2.5 使用手册
目录
一、介绍
...................................................................................................................................................
1
二、性能特点
...........................................................................................................................................
2
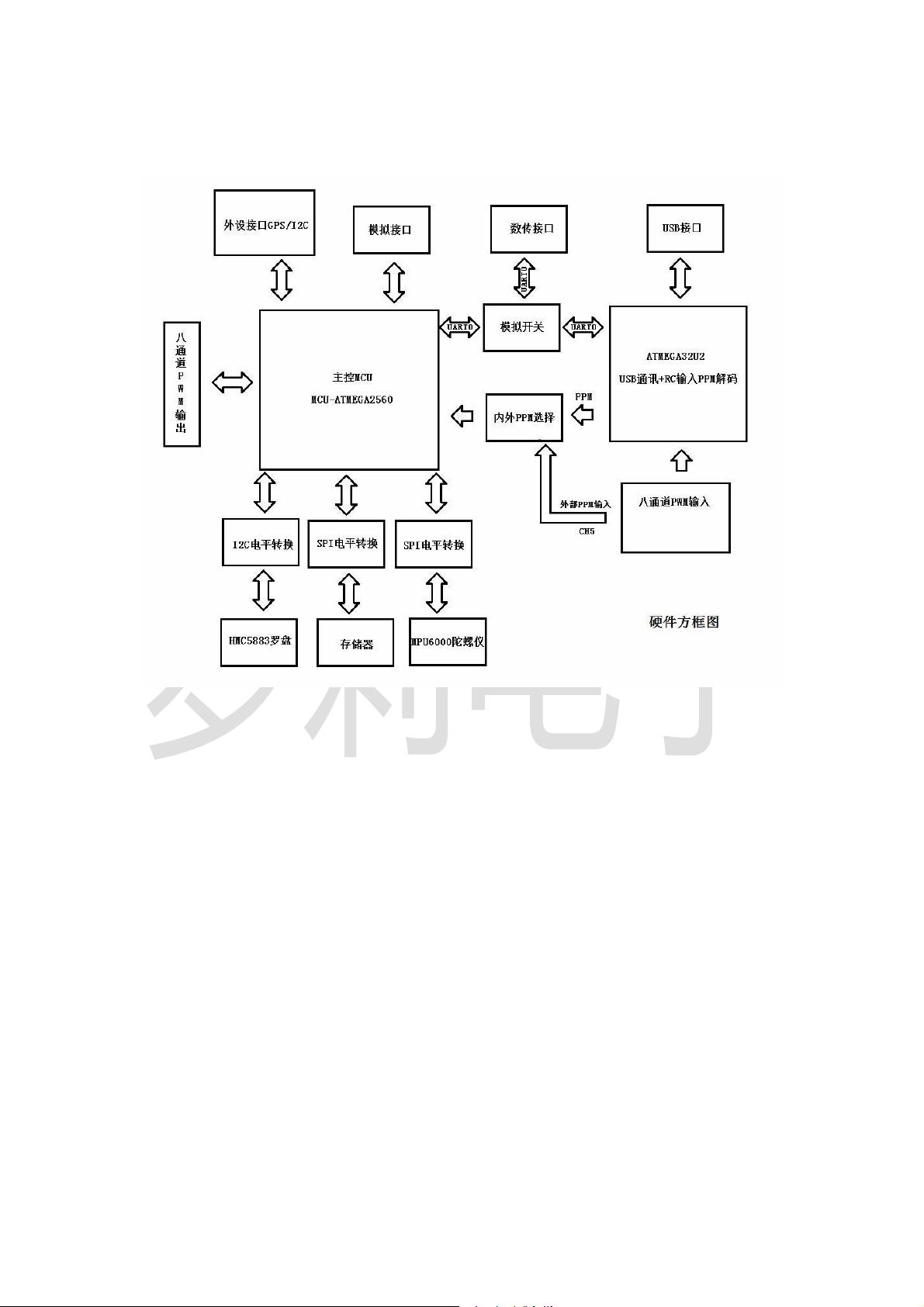
三、硬件构成
...........................................................................................................................................
2
四、硬件安装
...........................................................................................................................................
4
五、Windows 地面站安装
........................................................................................................................
4
六、连接地面站
.......................................................................................................................................
7
七、罗盘校准
...........................................................................................................................................
8
八、航线规划
.........................................................................................................................................
11
九、自动模式下速度设置
.....................................................................................................................
15
十、驾驶模式配置
.................................................................................................................................
16
十一、命令行的使用
.............................................................................................................................
17


剩余19页未读,继续阅读
资源评论


LLDZ918
- 粉丝: 68
- 资源: 1











