

单片机的线阵 CCD 实时检测系统
前 言
目前驱动主要有直接数字电路驱动、EPROM 驱动、专用 IC 驱动、复杂的 CPLD 驱
动等常用的驱动方法,但是它们存在着逻辑设计较为复杂、调试困难、柔性较差等缺点。
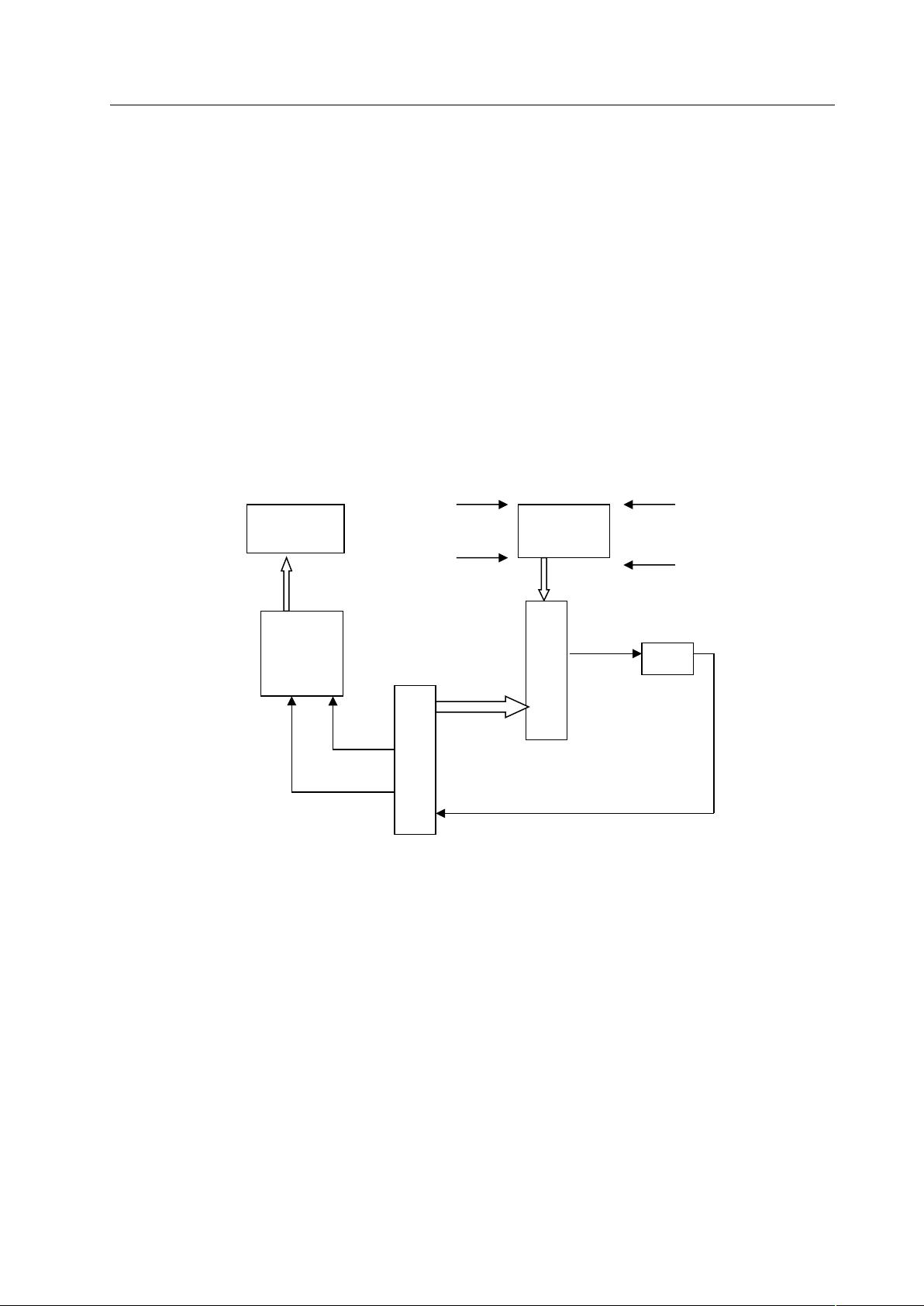
在数据采集和处理方面,大多数都经过差动放大、采样保持、A/D 转换,再通过总线或
采集卡等接口与 PC 机相连。
这种系统结构庞大,而且在信号处理、通信软件和界面设计等方面要耗费大量的精
力。应该说这种应用系统在静态测量处理方面有其优点,但如果要满足实时控制系统的
连续检测要求以及系统体积精小而容易装配等特点,则必须简化驱动电路、数据采集过
程和处理方式。本文正是出于这种考虑,开发出了一种基于单片机的实时性检测系统:
仅用 Atmel 公司一块小型的 AT89C2051 单片机便能产生稳定、精确、高速的驱动脉冲。
该电路结构简单、调试方便、CPU 占用率低,将驱动、采集和处理融为一体,而且与上
位机的连接仅用两条导线便可实现检测信息传输。这种方法大大简化了线阵 CCD 检测系
统的结构,在机器人视觉、智能小车、轨迹导引等动态检测方面有独特的应用优势。
1
剩余11页未读,继续阅读
资源评论













