pro/e机构仿真之运动分析


机构仿真之运动分析-
关键词:PROE仿真运动分析重复组件分析连接回放运动包络轨迹曲线
版权:原创文章,转载请注明出处
机构仿真是 PROE 的功能模块之一。PROE 能做的仿真内容还算比较好,不过用好的兄弟不多。
当然真正专做仿真分析的兄弟,估计都用 Ansys 去了。但是,Ansys 研究起来可比 PROE 麻烦
多了。所以,学会 PROE 的仿真,在很多时候还是有用的。坛子里关于仿真的教程也有过一些,
但很多都是动画,或实例。偶再发放一份学习笔记,并整理一下,当个基础教程吧。希望能对学
习仿真的兄弟有所帮助。
术语
创建机构前,应熟悉下列术语在 PROE 中的定义:
主体(Body) - 一个元件或彼此无相对运动的一组元件,主体内 DOF=0。
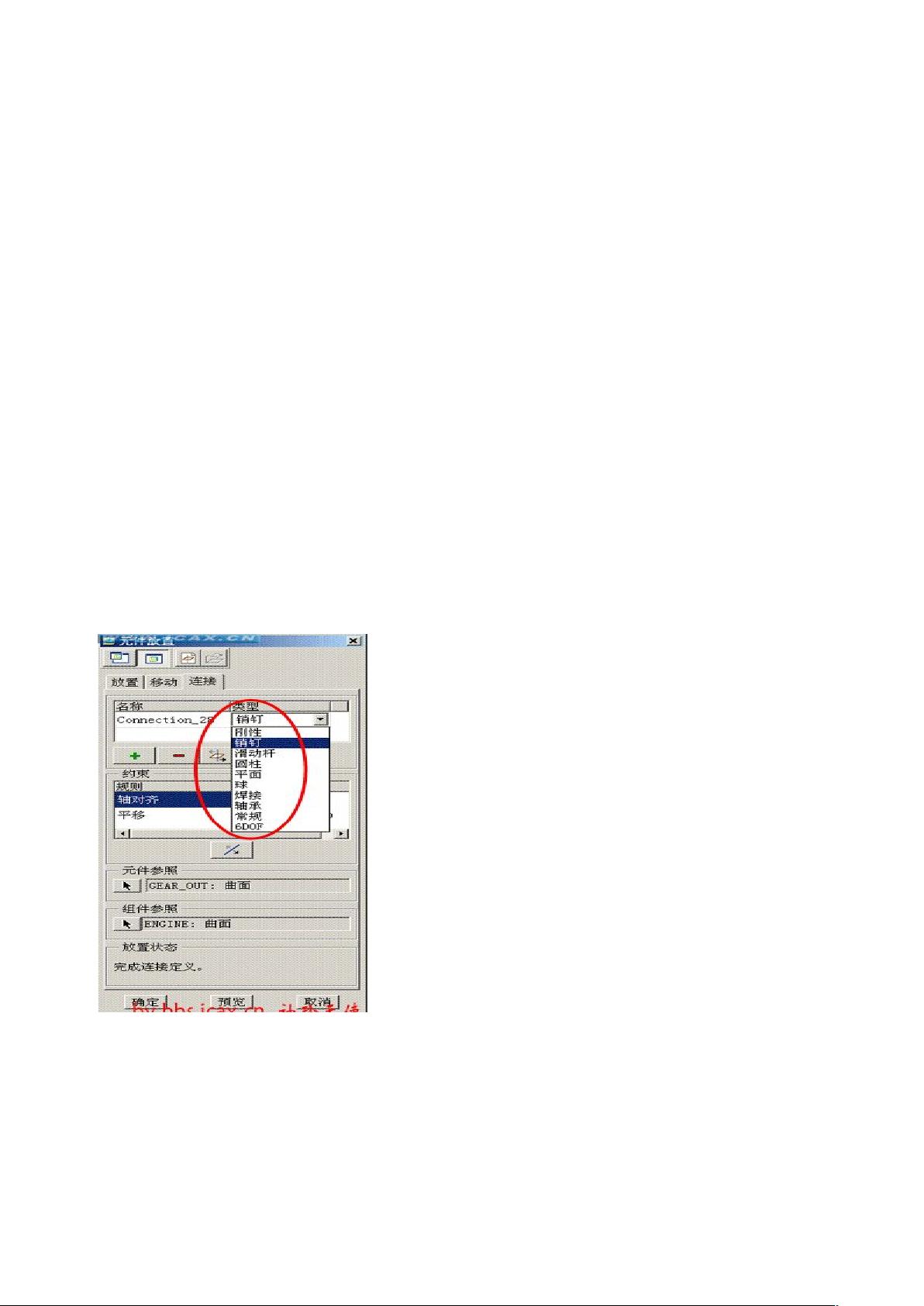
连接(Connections) - 定义并约束相对运动的主体之间的关系。
自由度(Degrees of Freedom) - 允许的机械系统运动。连接的作用是约束主体之间的相对
运动,减少系统可能的总自由度。
拖动(Dragging) - 在屏幕上用鼠标拾取并移动机构。
动态(Dynamics) - 研究机构在受力后的运动。
执行电动机(Force Motor) - 作用于旋转轴或平移轴上(引起运动)的力。
齿轮副连接(Gear Pair Connection) - 应用到两连接轴的速度约束。
基础(Ground) - 不移动的主体。其它主体相对于基础运动。
接头(Joints) - 特定的连接类型(例如销钉接头、滑块接头和球接头)。
运动(Kinematics) - 研究机构的运动,而不考虑移动机构所需的力。
环连接(Loop Connection) - 添加到运动环中的最后一个连接。
运动(Motion) - 主体受电动机或负荷作用时的移动方式。
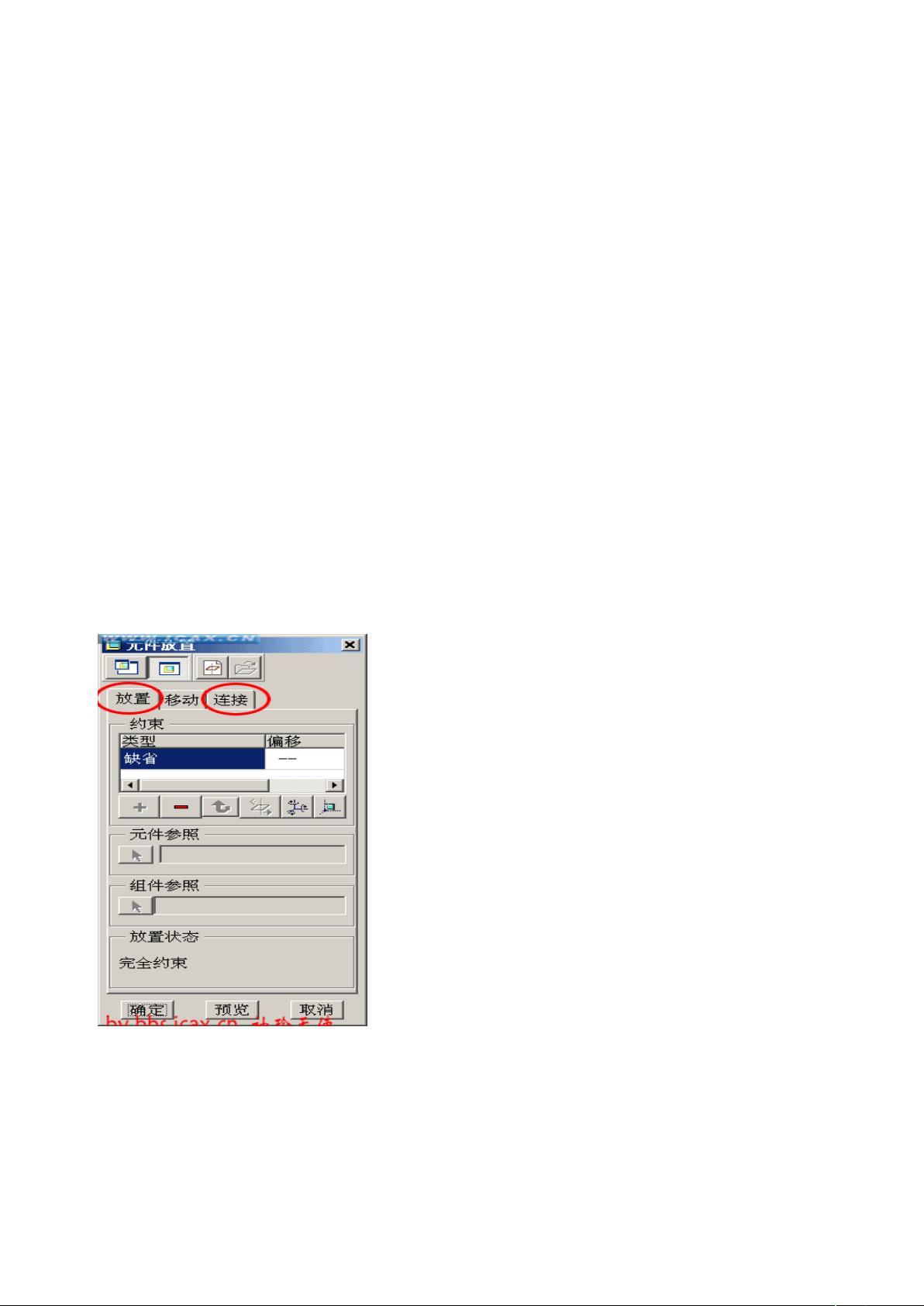
放置约束(Placement Constraint) - 组件中放置元件并限制该元件在组件中运动的图元。
回放(Playback) - 记录并重放分析运行的结果。
伺服电动机(Servo Motor) - 定义一个主体相对于另一个主体运动的方式。可在接头或几何
图元上放置电动机,并可指定主体间的位置、速度或加速度运动。
LCS - 与主体相关的局部坐标系。LCS 是与主体中定义的第一个零件相关的缺省坐标系。
UCS - 用户坐标系。
WCS - 全局坐标系。组件的全局坐标系,它包括用于组件及该组件内所有主体的全局坐标系。
运动分析的定义
在满足伺服电动机轮廓和接头连接、凸轮从动机构、槽从动机构或齿轮副连接的要求的情况下,
模拟机构的运动。运动分析不考虑受力,它模拟除质量和力之外的运动的所有方面。因此,运动
分析不能使用执行电动机,也不必为机构指定质量属性。运动分析忽略模型中的所有动态图元,
如弹簧、阻尼器、重力、力/力矩以及执行电动机等,所有动态图元都不影响运动分析结果。
如果伺服电动机具有不连续轮廓,在运行运动分析前软件会尝试使其轮廓连续,如果不能使其轮
廓连续,则此伺服电机将不能用于分析。
使用运动分析可获得以下信息:
几何图元和连接的位置、速度以及加速度
元件间的干涉
机构运动的轨迹曲线
作为Pro/ENGINEER 零件捕获机构运动的运动包络
重复组件分析
WF2.0 以前版本里的“运动分析”,在 WF2.0 里被称为“重复组件分析”。它与运动分析类似,所
有适用于运动分析的要求及设定,都可用于重复组件分析,所有不适于运动分析的因素,也都不
适用于重复组件分析。重复组件分析的输出结果比运动分析少,不能分析速度、加速度,不能做
机构的运动包络。
使用重复组件分析可获得以下信息:

剩余19页未读,继续阅读
资源评论

 hi_tom42011-11-23内容还行,但是缺少图片和模型
hi_tom42011-11-23内容还行,但是缺少图片和模型











