

LVS 实现负载均衡原理及安装配置
一、负载均衡 LVS 基本介绍
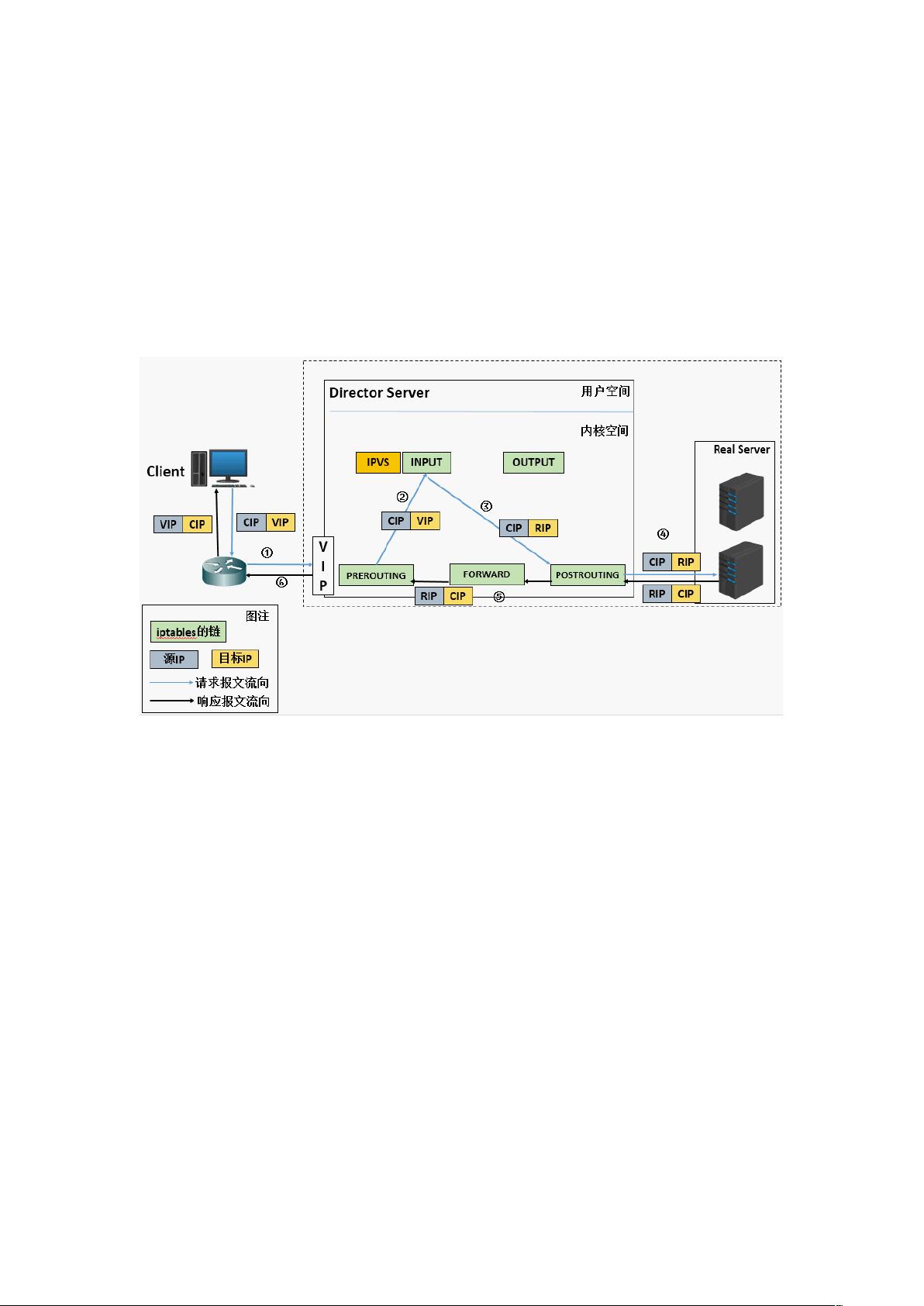
LB 集群的架构和原理很简单,就是当用户的请求过来时,会直接分发到
Director Server 上,然后它把用户的请求根据设置好的调度算法,智能均衡地
分发到后端真正服务器(real server)上。为了避免不同机器上用户请求得到的数
据不一样,需要用到了共享存储,这样保证所有用户请求的数据是一样的。
LVS 是 Linux Virtual Server 的简称,也就是 Linux 虚拟服务器。这是一个
由章文嵩博士发起的一个开源项目,它的官方网是
http://www.linuxvirtualserver.org 现在 LVS 已经是 Linux 内核标准的一部分。
使用 LVS 可以达到的技术目标是:通过 LVS 达到的负载均衡技术和 Linux 操
作系统实现一个高性能高可用的 Linux 服务器集群,它具有良好的可靠性、可
扩展性和可操作性。从而以低廉的成本实现最优的性能。LVS 是一个实现负载
均衡集群的开源软件项目,LVS 架构从逻辑上可分为调度层、Server 集群层和
共享存储。


剩余22页未读,继续阅读
资源评论


lijulan
- 粉丝: 2
- 资源: 22









最新资源
- lanchaoHunanHoutaiQiantai
- (177377030)Python 爬虫.zip
- (177537818)python爬虫基础知识及爬虫实例.zip
- 自动驾驶横纵向耦合控制-复现Apollo横纵向控制 基于动力学误差模型,使用mpc算法,一个控制器同时控制横向和纵向,实现横纵向耦合控制 matlab与simulink联合仿真,纵向控制已经做好油门刹
- (178199432)C++实现STL容器之List
- (178112810)基于ssm+vue餐厅点餐系统.zip
- 两相步进电机FOC矢量控制Simulink仿真模型 1.采用针对两相步进电机的SVPWM控制算法,实现FOC矢量控制,DQ轴解耦控制~ 2.转速电流双闭环控制,电流环采用PI控制,转速环分别采用PI和
- VMware虚拟机USB驱动
- Halcon手眼标定简介(1)
- (175128050)c&c++课程设计-图书管理系统
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


