
Published in IET Electric Power Applications
Received on 28th June 2013
Revised on 21st August 2013
Accepted on 8th September 2013
doi: 10.1049/iet-epa.2013.0221
ISSN 1751-8660
Simple sensorless algorithm for interior permanent
magnet synchronous motors based on high-frequency
voltage injection method
Nae-Chun Park, Sang-Hoon Kim
Department of Electrical and Electronics Engineering, Kangwon National University, Chuncheon, Kangwon-do, Korea
E-mail: kshoon@kangwon.ac.kr
Abstract: This study presents a simple sensorless algorithm based on the high-frequency signal injection for an interior
permanent magnet synchronous motor. The sensorless drive using a square-wave-type injection signal has an enhanced
control bandwidth and reduced acoustic noise owing to the reduction of filters and availability of high injection frequency.
However, this method still needs discrete filters to extract the fundamental and the injected frequency component currents; so
it has a limitation in enhancing the sensorless control performance. Therefore this study proposes a simple algorithm, which
eliminates these filters and further simplifies the signal process for estimating the rotor position. As a result, the overall
sensorless control can be implemented easily without any filters while providing an enhanced dynamics. Additionally, a
detection method of an initial rotor position for start-up by using the same square-wave-type voltage injection is introduced.
The experimental result shows that the speed control bandwidth in the sensorless drive simplified by the proposed algorithm
becomes very close to the one achieved in sensored drives.
1 Introduction
Interior permanent magnet synchronous motors (IPMSMs)
have become increasingly popular in a variety of high
performance motor drive applications that require an
instantaneous torque control. This is because of their many
attractive characteristics such as high efficiency, high
torque/power density and fast dynamics. However, the
vector control for the instantaneous torque control of
IPMSMs requires a position sensor such as a resolver,
which is expensive and may reduce the system reliability
[1, 2].
For more than two decades, many efforts have been made
to develop a sensorless drive of IMPSMs. These sensorless
techniques are subdivided into two major groups according
to whether or not a special signal is used to derive a rotor
position. One obtains the rotor position from back
electromotive force (EMF) information in normal operating
condition without any special signal [3, 4]. The other one
uses the high-frequency excitation of a special signal to
extract the rotor position from the magnetic saliency of an
IPMSM. The former techniques are simpler compared to
the latter and are capable of providing a satisfactory
performance within the medium- to high-speed range.
However, since they are based on back EMF proportional
to a rotor speed, their performance is inevitably limited in
the low-speed range.
The latter techniques exploit the magnetic saliency, which
is an apparent characteristic regardless of operating speeds
[5]. Thus, these techniques can give a good performance
even in the low-speed range, including at standstill.
However, the high-frequency signal injected to extract the
rotor position results in an acoustic noise, an additional
torque ripple and a loss of high-speed operations. In
addition, the system using the high-frequency signal
injection technique gives a complex signal processing to
estimate the rotor position and has limited control
bandwidth due to the time delay by discrete filters required
in such signal processing. Among these weaknesses, a
voltage shortage due to the generation of an injection signal
in high-speed operations is inevitable. Thus, hybrid
methods that use high-frequency signal injection technique
at low speed but back EMF technique at higher speed have
been proposed [6, 7].
On the other hand, the complexity of the signal processing
has been quite alleviated through various selections of the
reference frame executing a signal processing [8, 9].
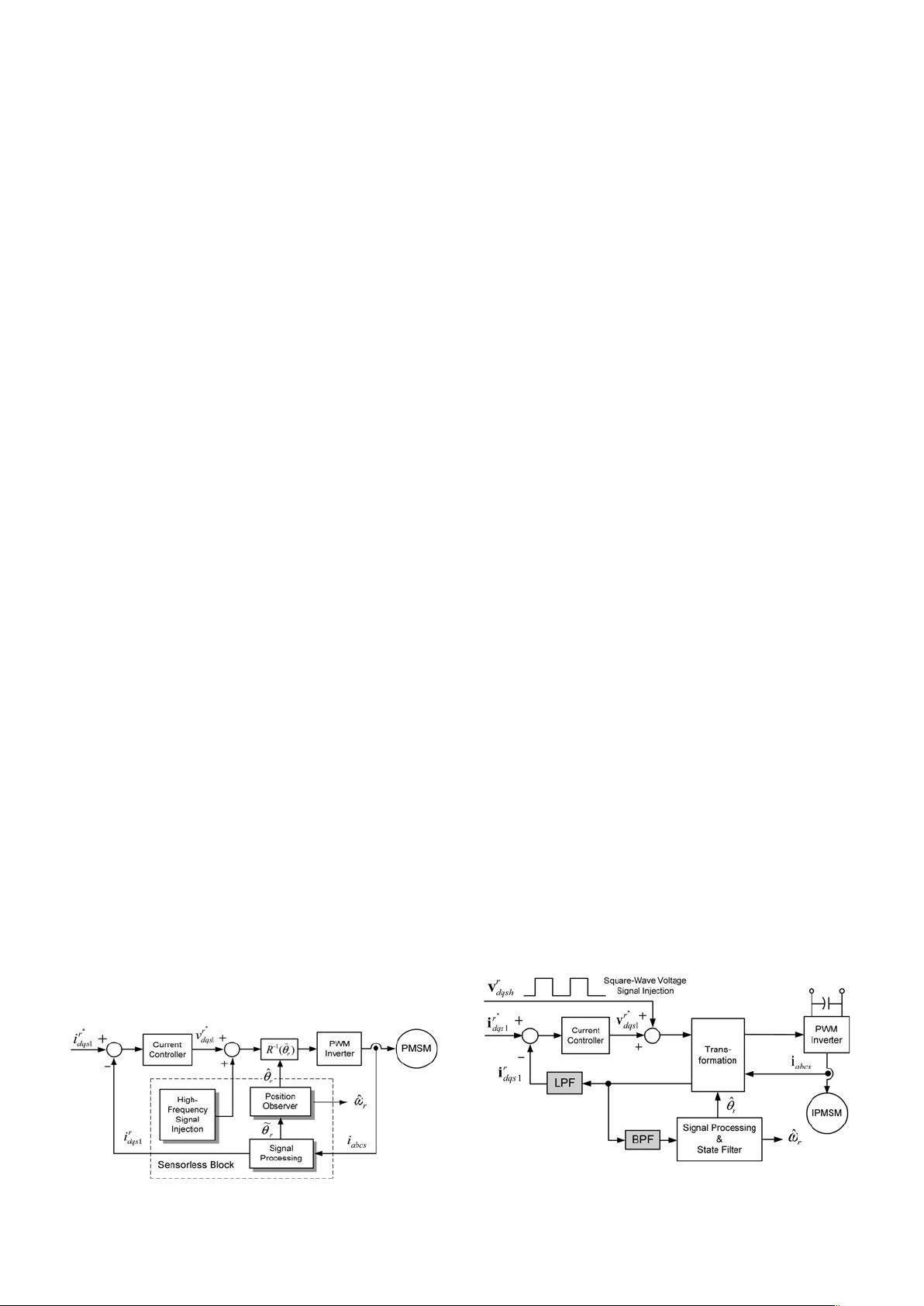
Furthermore, recently, there has been an attempt to change
the type of an injection signal to enhance the control
bandwidth and reduce an acoustic noise [10–12]. In these
works, a square-wave-type injection signal has been
adopted instead of the conventional sinusoidal signal. In
this case, low-pass filters are not used in the demodulation
process to extract the rotor position-related value and the
frequency of the injected signal can be higher. Accordingly
the sensorless drive system has an advantage of an
enhanced control bandwidth and reduced acoustic noise.
Such system, however, still requires another low-pass filter
to extract the fundamental current and another band-pass
filter to extract the injected frequency component current
www.ietdl.org
68
&
The Institution of Engineering and Technology 2014
IET Electr. Power Appl., 2014, Vol. 8, Iss. 2, pp. 68–75
doi: 10.1049/iet-epa.2013.0221
剩余7页未读,继续阅读






评论0
最新资源