
1
SPRA605A–February 2000–Revised August 2017
Submit Documentation Feedback
Copyright © 2000–2017, Texas Instruments Incorporated
TMS320F240 DSP Solution for Obtaining Resolver Angular Position and
Speed
Application Report
SPRA605A–February 2000–Revised August 2017
TMS320F240 DSP Solution for Obtaining Resolver Angular
Position and Speed
Martin Staebler, Ankur Verma
ABSTRACT
This application report first presents a TMS320F240 DSP solution and then another unique approach
using PGA411-Q1 for obtaining the angular position and speed of a resolver.
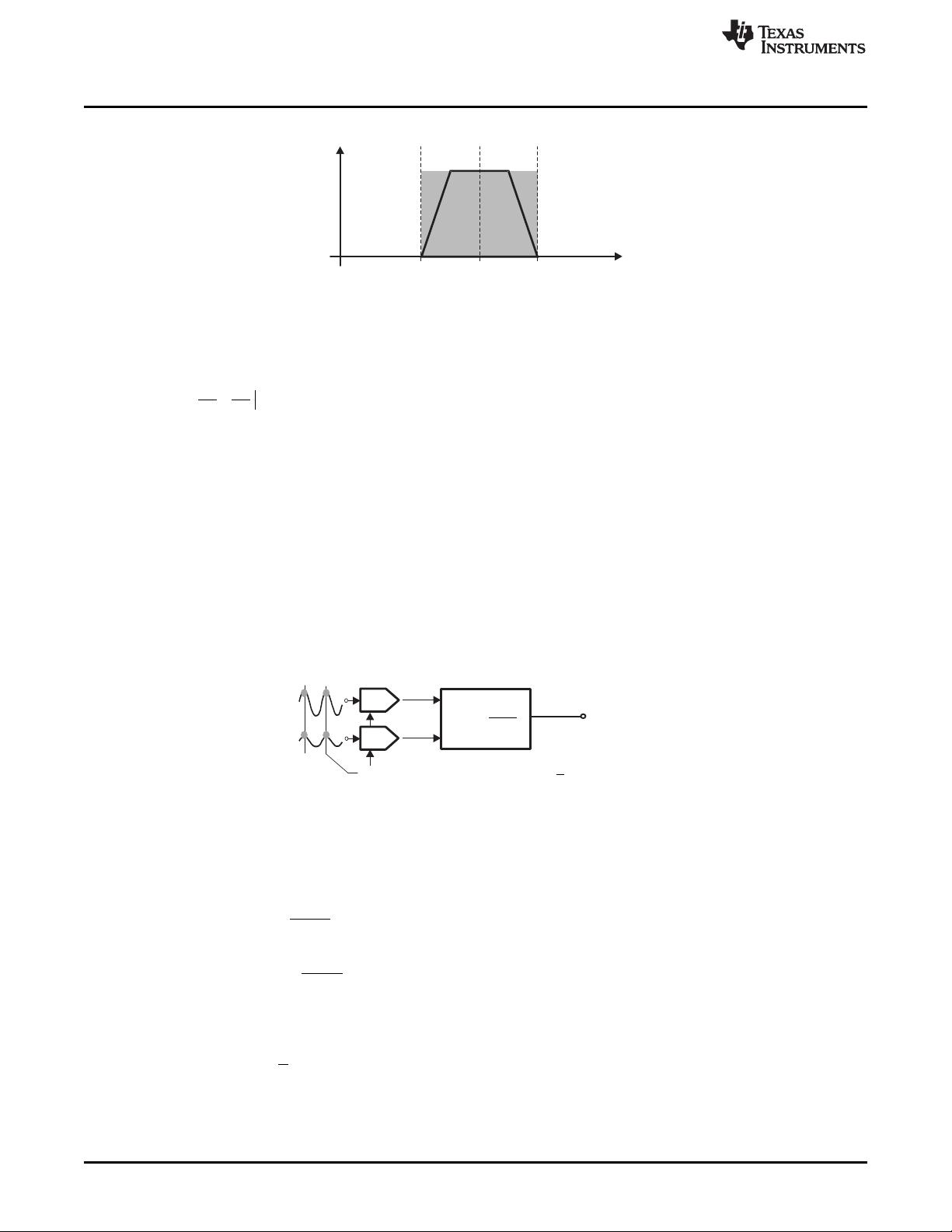
A resolver is an absolute mechanical position sensor used, for example, in servo applications. It is
basically a rotating transformer. The sinusoidal input reference is amplitude modulated with the sine and
cosine of the mechanical angle, respectively. These two output signals have to be decoded to obtain the
angular position.
For decoding the resolver output signals, a basic method is introduced. It uses undersampling and an
inverse tangent function. To achieve a higher angular resolution an improved method, which adds
oversampling techniques is used. Due to an integral invariant filter, which is a combination of an IIR and
FIR filter, the digitized angular position does not suffer any velocity lag.
Thanks to its peripherals, the Texas Instruments TI™ TMS320F240 DSP can be ideally used for decoding
the two resolver output signals as well as for generating the input reference frequency. The hardware
interfacing of the resolver to the TMS320F240 is shown and the software realization of the improved
method on the TMS320F240 is documented. All software routines are C-compatible. The angular
resolution achievable with the TMS320F240 is up to 14 bits, at a CPU loading of 13%.
The TMS320F240 will, therefore, eliminate the cost for the external resolver-to-digital conversion IC
because the algorithm runs in addition to the motor control task.
The alternative approach uses PGA411-Q1 that is a resolver-to-digital converter, with an integrated
exciter-amplifier and boost-regulator power supply, that is capable of both exciting and reading the sine
and cosine angle from a resolver sensor. The integrated boost converter and exciter amplifier of the
PGA411-Q1 reduces system cost and board space compared to traditional RDC solutions. On-chip
protection and diagnostic improve robustness against short-circuit and increase safety by detecting
external fault conditions. A high-speed, 3.3-V SPI allows PGA411-Q1 configuration, diagnostics, angle,
and velocity information. An example of a TI design using PGA411-Q1 is the EMC Compliant Single-Chip
Resolver-to-Digital Converter (RDC). The TI design also includes example firmware on a C2000™ MCU to
allow easy real-time evaluation of the TI Design.
Contents
1 Introduction ................................................................................................................... 2
2 The Resolver – An Absolute Angle Transducer ......................................................................... 3
3 Obtaining Angular Position and Speed of the Resolver ................................................................ 4
3.1 Resolver-to-Digital (R/D) Conversion – Using Undersampling ............................................... 4
3.2 R/D Conversion – Improved Method Using Oversampling.................................................... 5
4 TMS320F240 DSP Implementation ....................................................................................... 7
4.1 Overview ............................................................................................................. 7
4.2 TMS320F240 Hardware Interface ................................................................................ 8
4.3 TMS320F240 Software Implementation........................................................................ 10
4.4 Changing Parameters ............................................................................................ 15
5 PGA411-Q1 Implementation.............................................................................................. 16
5.1 Overview............................................................................................................ 16
5.2 PGA411-Q1 System Architecture .............................................................................. 16


剩余21页未读,继续阅读
资源评论


legendgo
- 粉丝: 0
- 资源: 1









最新资源
- 微信自动抢红包APP.zip毕业设计参考学习资料
- 为 Wireshark 能使用纯真网络 IP 数据库(QQwry)而提供的格式转换工具.zip
- 音频格式转换工具.zip学习资料程序资源
- 自用固件,合并openwrt和immortalwrt编译AX6(刷机有风险).zip
- 最新GeoLite2-City.mmdb,GeoLite2-Country.mmdb打包下载
- 基于BootStrap + Springboot + FISCO-BCOS的二手物品交易市场系统.zip
- 使用Java语言编写的九格拼游戏,找寻下曾经小时候的记忆.zip
- gakataka课堂管理系统
- 一个简单ssh(spring springMVC hibernate)游戏网站,在网上找的html模板,没有自己写UI,重点放在java后端上.zip
- 一个采用MVC架构设计、Java实现的泡泡堂游戏.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


