第 28卷 第 3期
2005年 6月
水 电 站 机 电 技 术
Mechanical 8L Electrical Technique of Hydropower Station
Vo1.28 No.3
Jun已2005 23
基于 MATLAB的水轮机调节系统仿真
罗 旋,魏 守平
(华中科技大学水电与数字化工程学院 ,湖北 武汉 430074)
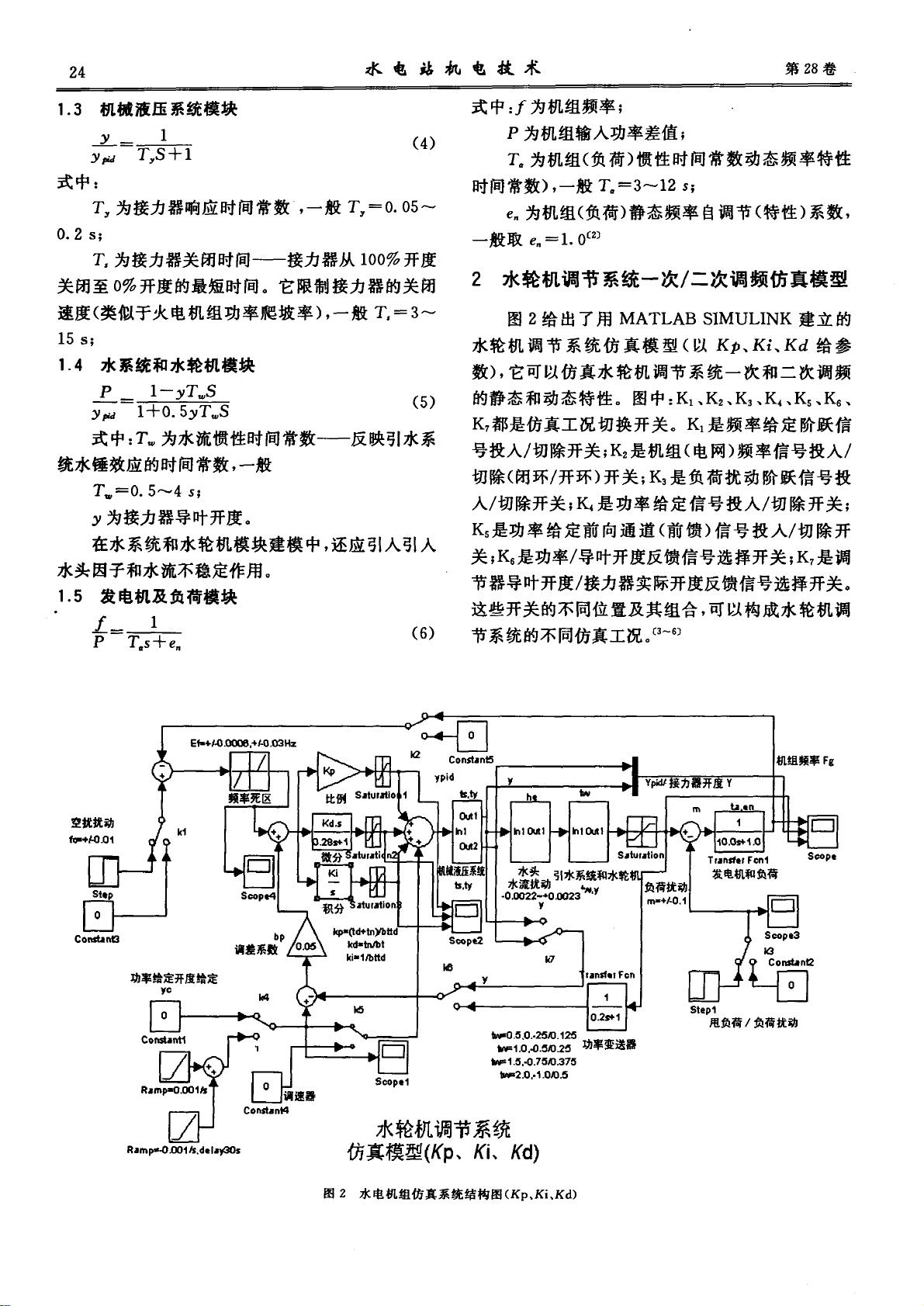
摘 要:对 水轮机调 节系统建立数学模 型,利 用美 国 Mathworks公 司 的 MATLAB软件,对通常的水轮机调 速器 水
电站试验项 目(空载频率波 动、空载扰动、甩负荷)进 行初 步的仿真。
关键 词 :水轮 机调 节系统;MATLABI仿真
中图分类号 :TP391.9 文献标识码 :B 文章编号 :1672—5387(2005)03--0023--04
水轮机调 节系 统 由引水 系统 、水轮 机 、发 电机 、
和调速器等组成 ,是一 个包 含 水力 、机械 、电气 的复
杂的控制系统 。在分析 、综合水 轮机 调节系统时,希
望求 出调 节系统 的动态 过程 ,并通 过对 动态 过程 的
分析确定 调速器的最佳参 数 。利用 MATLAB软件
对水 轮机调节系统 进行 仿 真 ,能够 克 服现场的种种
限制 ,具有直观 、方便 、迅速的优点 ,对实际的操作进
行指 导 。
1 水轮机调 节 系统数学模型
1.1 水轮 机调节 系统 的结构
水轮机调节系统是由水轮机 控制设备 (系统)和
被控 制系统组 成 的闭环 系统 。水 轮机 、引水 和泄 水
系统 、装有 电压调节 器 的发 电机 所并 人 的 电网称 为
水 轮机调节 系统 中 的被控 制 系统 ;用 来 检测 被控 制
参 量(转 速 、功率、水位 、流 量等)与给定量 的偏差 ,并
将其 按一定 特性转成主接力器行程偏差 的一些装 置
组合 ,称为水轮机控制 设备 (系统)。(13
水轮机 调节系统结构 图(图 1):
图 1
1.2 水轮 机调速器 的 PID调节模块
Y t  ̄ = k
,
+ +
Y 一A厂+ (户 一 )
l— lt— l
f0 lAfl<e
.f
f一 l—e| Af>e|
Iafq-ez △ --e.f
Yea
. 一 ± + 垒!: +
Y 6 T 。0.28S+ 1 。 S
Y —A/+ (户 一户)
l— l c— l
rO I△f{<e/
f一 l—e| Af>e|
【afq-ez A --e.f
式 中 :b 为暂 态转差系数,O~1.0
(1)
(2)
1 为 缓 冲 时 I司常 效 ,整 定 范 围 为 :2~ 20 s;
为加速度 时间常数 ,整定范 围为 :O~2 s;
K,为 比例增益 ,整定范 围为 :O.5~2O;
K 为积分增益 ,整定 范围为:0.O5~ 10(1/s);
K 为微 分增益 ,整定范 围为 :O~5s;
两种调节参数表达形式的换算关系为:
K,一 1
K 一
} 3
K 一
I
收稿 日期 :2005-03-07
作 者简 介 :罗旋(1978一 ),男 ,硕 士研究 生 ,主要研 究方 向为水轮机
调速器控 制 系统和 仿真.
维普资讯 http://www.cqvip.com