


N
基 于 STM32F4O7的
轮式机器人定位控制系统的设计
新 技术
ew Technology
口孙猛猛 杨 明辉 张玉炳 万林 武汉大学动力与机械学 院
【摘 要 】 传统的双码盘和陀螺仪定位 系统 由于 受到地面环境 因素的影响,导 致其定位精度 不高。本 文提 出了一种基于
STM32F4O7ZGT6的轮式机器人定位控 制位系统的设计 方案 ,在传统 的双码盘和陀螺仪 的定位 系统 中加入 了激光雷达和 DT50激 光测
距 仪作 为辅助定 位手段 。采 用 STM32F4O7ZGT6作为本控制系统的核心处理器 ,并且给 出了相关部 分的硬件设计和 系统总体 的软件架
构 。从 测试结 果表明 ,该定位 系统完成 了轮式机器人 的定位 ,完全达到 了预期设计要 求。
【关键词 】 轮式机器人 sTM32F4O7zGT6 定位系统 激光雷达 激光测距仪
一
、 概 述
轮式 机器 人在应 用普 及 的过 程 中 ,由 于地面 环境 的复 杂
性 、运 动路 径不 固定等 问题 使得 轮式机 器人 的定位 成为 其应
用普 及 的关 键 性 问题 。
针对 该 问题 ,本文 提 出 了一 种 基 于 STM32F407的 定 位
控 制 系统设 计方 案 ,该 方案 综合 了嵌人 式控 制技 术 、传 感器
技 术及 通讯 技术 ,检测 与控 制轮 式机器 人 的运动 状态 ,实现
了轮 式机 器人 的定位 功能 。
二 、定 位 系统总体 方案设 计
在改 定 位系 统 中 ,主控器 通过 PWM脉 宽调 制技 术 控制
电机 驱 动模 块 ,通 过定 位 板模块 给 出机 器人 确定 的 出 发位置 ,
通 过辅 助定 位模块 对机 器人 的位 置进行 必要 的坐标 纠正 。在
机 器人 运行 的过 程 中通 过无 线通讯 模块 将机 器人 实时 的位置
坐 标传 到上位 机 ,用户 可通过 上位 机操作 界 面对机 器人进 行
实 时 的操 作与 监 测 。
整个 硬件框 图 由调试器 下载 口、电机驱 动部 分 、电源部
分 、晶振 部分 、主控板 、定位 板模块 、主控板 、辅 助定位 板
模 块 1和辅助 定 位板模 块 2组 成 。
三 、关 键 部 分 硬 件 电 路 设 计
3.1关键 电子 元器件选 型
主控 板 芯片 选 型:要 满 足 多路 PWM输 出口 、I/O中断 口、
多种通 讯功 能包 括 CAN通信 和 串 口通信 ,因此选 用 ST公 司
的 sTM32F407ZGT6。 定位 板 模 块 芯 片选 型 :要 满 足 多 路 脉
冲信号输 入 、I/O口 、多种 通讯 功能包括 CAN通信 和 SPI通信 ,
因 此 选 用 ST公 司 的 STM32F405RGT6。
辅 助 定 位 模 块 1、2控 制 器 选 型 :辅 助 定 位 与 主 控 是
CAN总 线 组 网通 讯 ,控 制 器 芯 片选 用 STM32F103R8T6,既
满 足 实用 性又 满 足经 济性 。
四、 定位 系统软件 设 计
4.1主 控 板 程 序 流 程
主控 板 通过 CAN通信 协议 与 定位 板 、辅 助 定位 板 1、辅
助定位 板 2进行通 信 ,主控每 隔 5ms收到 定位板 的坐标 值 ,
然 后根 据需要启 动 激光雷 达或者 DTS0。激光 雷达 或 DT50根
据 当 前 定位 板 的坐 标解 算 出 纠正后 的坐 标 ,然后直 接进 行坐
标 替 换 。
4.2定 位 板 程 序 流 程
定 位 板通 过定 时器 采集 码盘 的 脉 冲信 号 和 Spi通 信 协议
读 取 陀螺仪 的数据 ,然 后计 算 出当前位 置坐 标 。定 位板 分别
通 过 串 口 Usart和 Can协议 将 当前 坐标 值发 送 给 上位 机 和主
控 板 。
4.3辅助 定 位板 1(激 光 雷 达 )和 辅 助定 位板 2(DT50)
的程 序流 程
主控板 根据需 要 (由上 位机决 定 )启动 激光雷 达或 激光
测 距 仪 (DT50)进 行 辅 助定 位 ,激光 雷 达 或 DT50收到 指令
后 根据 车子 当前坐标 和测 出障碍物 的距离 来计 算正 确位 置坐
标 ,然后将 坐标 发送给 定位板 进行数 据替换 。
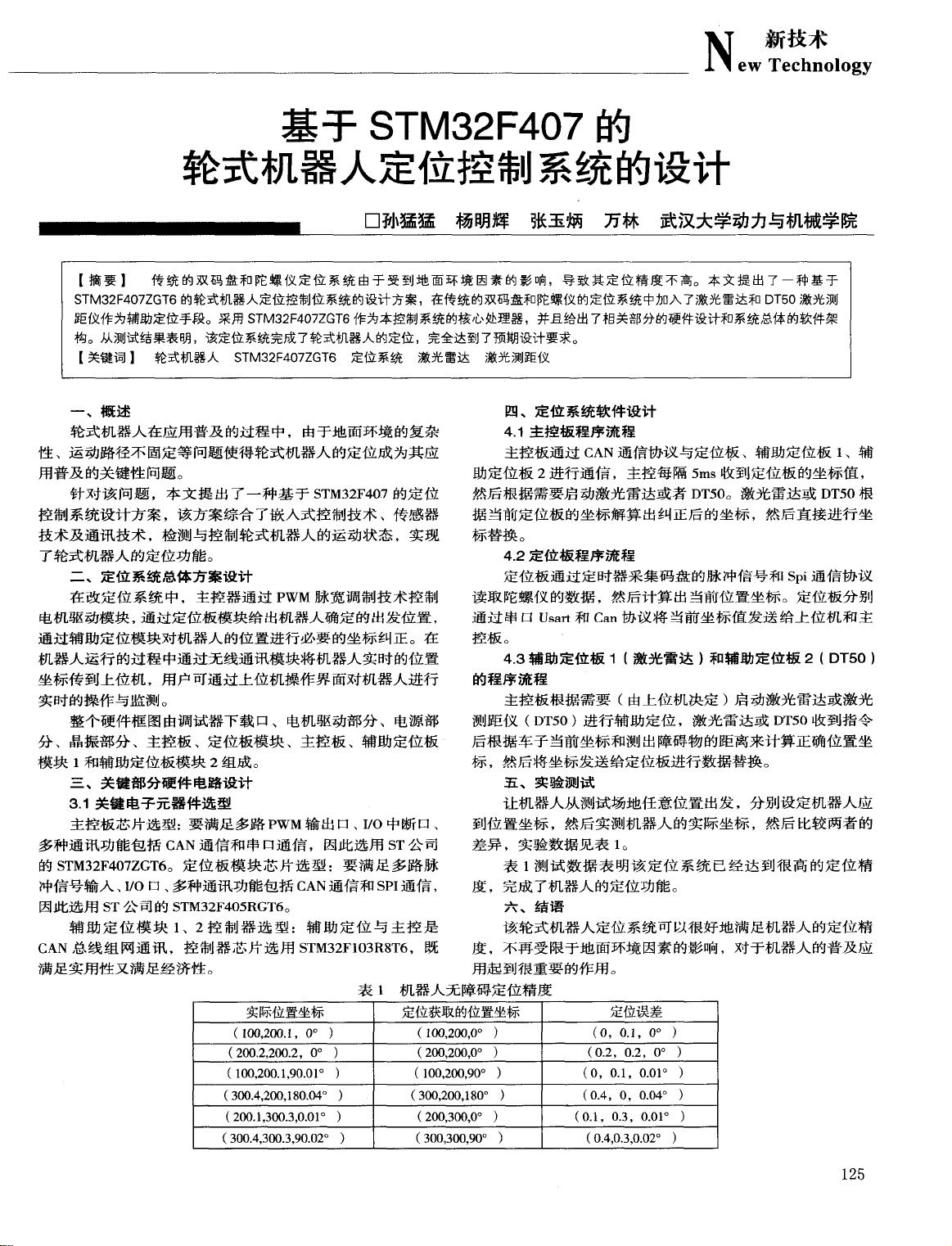
五 、 实 验 测 试
让 机器 人从钡4试场 地任 意位置 出发 ,分别设 定 机器 人应
到 位置 坐标 ,然后 实测 机器人 的实 际坐 标 ,然后 比较两 者 的
差 异 ,实 验数据 见 表 1。
表 1测 试 数 据 表 明该 定位 系统 已经 达 到很 高 的定 位 精
度 ,完成 了机器 人 的定 位功 能 。
六 、结 语
该 轮 式 机器人 定位 系统 可 以很 好地 满足 机器人 的定 位精
度 ,不再 受 限于地 面环境 因素的影 响 ,对于机 器人 的普 及应
用起 到很重 要 的作用 。
表 1 机 器 人无 障碍定 位 精度
实际位置坐标 定位 获取的位置坐标 定位误差
(100,200.1,0。 ) (100,200,0。 ) (0,0.1,0。 )
(200.2,200.2,0。 ) (200,200,0。 ) (0.2,0.2,0。 )
(100,200.1。90.01。 ) (100,200,90。 ) (0,0.1。0.O1。 )
(300.4,200,180.04。 ) (300,200,180。 ) (0.4,0.0.04。 )
(200.1,300.3。0.O1。 ) (200,300,0。 ) (0.1,0.3,0.O1。 )
(300.4,300.3,90.02。 ) (300,300,90。 ) (0.4,0.3,0.02。 )
125


















