Appl. Sci. 2020, 10, 347 2 of 18
(c)
Investigating the performance of the proposed method by comparing it to the popular SLAM
methods (LiDAR odometry and mapping (LOAM) and normal distribution transform (NDT)
SLAM), in the actual world environment.
2. Related Works
In autonomous vehicle navigation systems, SLAM is a method used to generate map awareness
of the vehicle. It is mainly used to know or locate the position of the vehicle body (i.e., similar to
odometry) based on an environmental scan comparison with the generated map. Unlike odometry
algorithms which use motion sensors (e.g., encoders, IMUs, etc.) to estimate pose, SLAM reduces or
eliminates the drift issue seen in odometry. Drift error is an accumulation of small computational
errors due to sensor accuracy specifications, electrical noises, temperature, etc., which when summed
in odometry pose estimation can result in a linear increase of pose error based on travel distance.
SLAM solves or reduces drift error of pose estimation by using an optimization technique using map
data. This requires sensors which are able to sense the environment and object distances such as
LiDAR or three-dimensional (3D) camera and sometimes additional sensors such as IMU encoders
are needed [
2
,
3
]. The map is generated through the accumulation of scan data by this sensor during
vehicle motion. Some of the SLAM methods also require odometry sensors such as IMU or wheel
speed to provide better pose estimation accuracy. When the SLAM recognizes previously visited areas
by comparing the environment with the map, it triggers pose correction to eliminate or reduce the drift
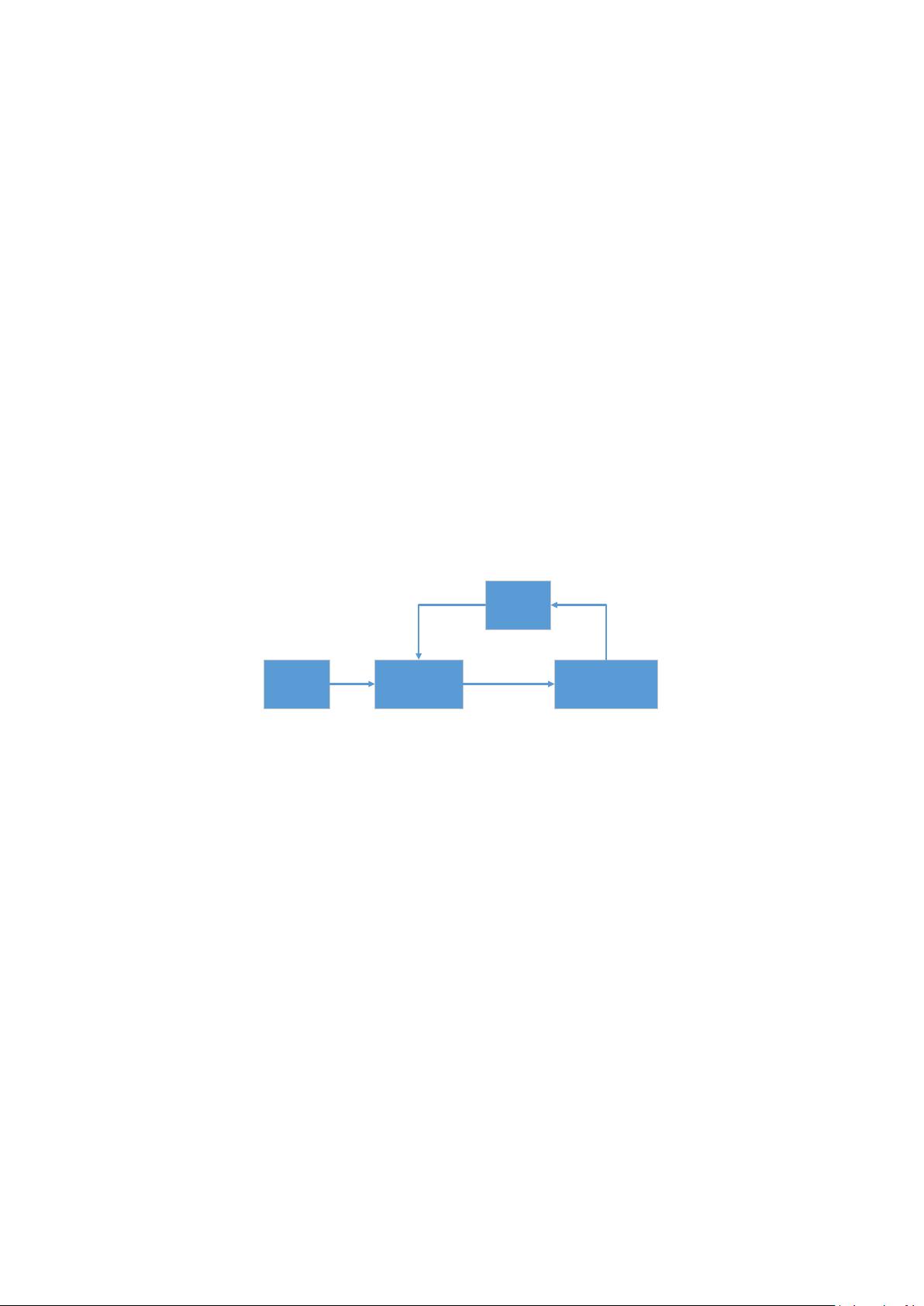
error. Figure 1 illustrates the SLAM framework used in this work.
Appl. Sci. 2020, 10, x FOR PEER REVIEW 2 of 18
c) Investigating the performance of the proposed method by comparing it to the popular SLAM
methods (LiDAR odometry and mapping (LOAM) and normal distribution transform (NDT)
SLAM), in the actual world environment.
2. Related Works
In autonomous vehicle navigation systems, SLAM is a method used to generate map awareness
of the vehicle. It is mainly used to know or locate the position of the vehicle body (i.e., similar to
odometry) based on an environmental scan comparison with the generated map. Unlike odometry
algorithms which use motion sensors (e.g., encoders, IMUs, etc.) to estimate pose, SLAM reduces or
eliminates the drift issue seen in odometry. Drift error is an accumulation of small computational
errors due to sensor accuracy specifications, electrical noises, temperature, etc., which when summed
in odometry pose estimation can result in a linear increase of pose error based on travel distance.
SLAM solves or reduces drift error of pose estimation by using an optimization technique using map
data. This requires sensors which are able to sense the environment and object distances such as
LiDAR or three-dimensional (3D) camera and sometimes additional sensors such as IMU encoders
are needed [2,3]. The map is generated through the accumulation of scan data by this sensor during
vehicle motion. Some of the SLAM methods also require odometry sensors such as IMU or wheel
speed to provide better pose estimation accuracy. When the SLAM recognizes previously visited
areas by comparing the environment with the map, it triggers pose correction to eliminate or reduce
the drift error. Figure 1 illustrates the SLAM framework used in this work.
SENSOR
DATA INPUT
FRONT-END/LOCAL
SLAM
(POSE GENERATION)
BACK-END/GLOBAL SLAM
(OPTIMIZATION)
POSE UPDATE
CONSTRAINTS
MAP
Figure 1. Simultaneous localization and mapping (SLAM) framework.
Although the SLAM method provides improved pose calculation for autonomous vehicles by
recognizing previously recorded areas, there are still some issues that need to be addressed, for
example, creating a real-time process in SLAM for mapping has some computation problems related
to reduced performance due to the use of a scan matcher. A scan matcher is used to perform two
different tasks. On the one hand, one task is the initial pose estimation, and on the other hand, a
second task is the pose correction. The initial pose estimation compares the previous step of sensor
scans of LiDAR or camera against current scan data. Thus, the disparity residual of current scan data
versus the previous scan data in each step is used to estimate vehicle motion for the initial pose,
similar to the odometry method. Over time, it eventually drifts due to the accumulation of error. The
drift error is then corrected using the latter method, which is a scan matcher against the overall map.
The process records the map by accumulating scan data in every step of vehicle motion. Using a
larger scale scan matcher, unlike the former task, it compares the current scan with the whole map
globally. When the scan matcher finds similarity above a certain threshold on the global map, the
position of the scan and vehicle when drifting are aligned to a recognized area, and thus a pose
correction scenario is created.
A small map runs fast enough with SLAM, however, overtime it will become cumbersome as
the map grows larger during SLAM’s map creation. As the map size becomes larger, it consumes
more memory capacity and the scan matching performance becomes slower [4–6]. Some
improvements have been introduced to improve computational performance. In [7–11], there are
some SLAM methods that use specialized computer hardware for parallel programming, for
example, a graphic processing unit (GPU). The GPU is much faster than the central processing unit
(CPU) for processing a large dimension of matrix arrays or parallel executions. Map data in SLAM
Figure 1. Simultaneous localization and mapping (SLAM) framework.
Although the SLAM method provides improved pose calculation for autonomous vehicles by
recognizing previously recorded areas, there are still some issues that need to be addressed, for example,
creating a real-time process in SLAM for mapping has some computation problems related to reduced
performance due to the use of a scan matcher. A scan matcher is used to perform two different tasks.
On the one hand, one task is the initial pose estimation, and on the other hand, a second task is the pose
correction. The initial pose estimation compares the previous step of sensor scans of LiDAR or camera
against current scan data. Thus, the disparity residual of current scan data versus the previous scan
data in each step is used to estimate vehicle motion for the initial pose, similar to the odometry method.
Over time, it eventually drifts due to the accumulation of error. The drift error is then corrected using
the latter method, which is a scan matcher against the overall map. The process records the map by
accumulating scan data in every step of vehicle motion. Using a larger scale scan matcher, unlike
the former task, it compares the current scan with the whole map globally. When the scan matcher
finds similarity above a certain threshold on the global map, the position of the scan and vehicle when
drifting are aligned to a recognized area, and thus a pose correction scenario is created.
A small map runs fast enough with SLAM, however, overtime it will become cumbersome as the
map grows larger during SLAM’s map creation. As the map size becomes larger, it consumes more
memory capacity and the scan matching performance becomes slower [
4
–
6
]. Some improvements have
been introduced to improve computational performance. In [
7
–
11
], there are some SLAM methods that
use specialized computer hardware for parallel programming, for example, a graphic processing unit
(GPU). The GPU is much faster than the central processing unit (CPU) for processing a large dimension
of matrix arrays or parallel executions. Map data in SLAM are similar to a multimedia image which
















