
PID Overview
!
"#$%
$ !$ ! !%
!$$
% ! !
!$$ !$$
%
! !% !
!%
$$%
&'% !%
(!
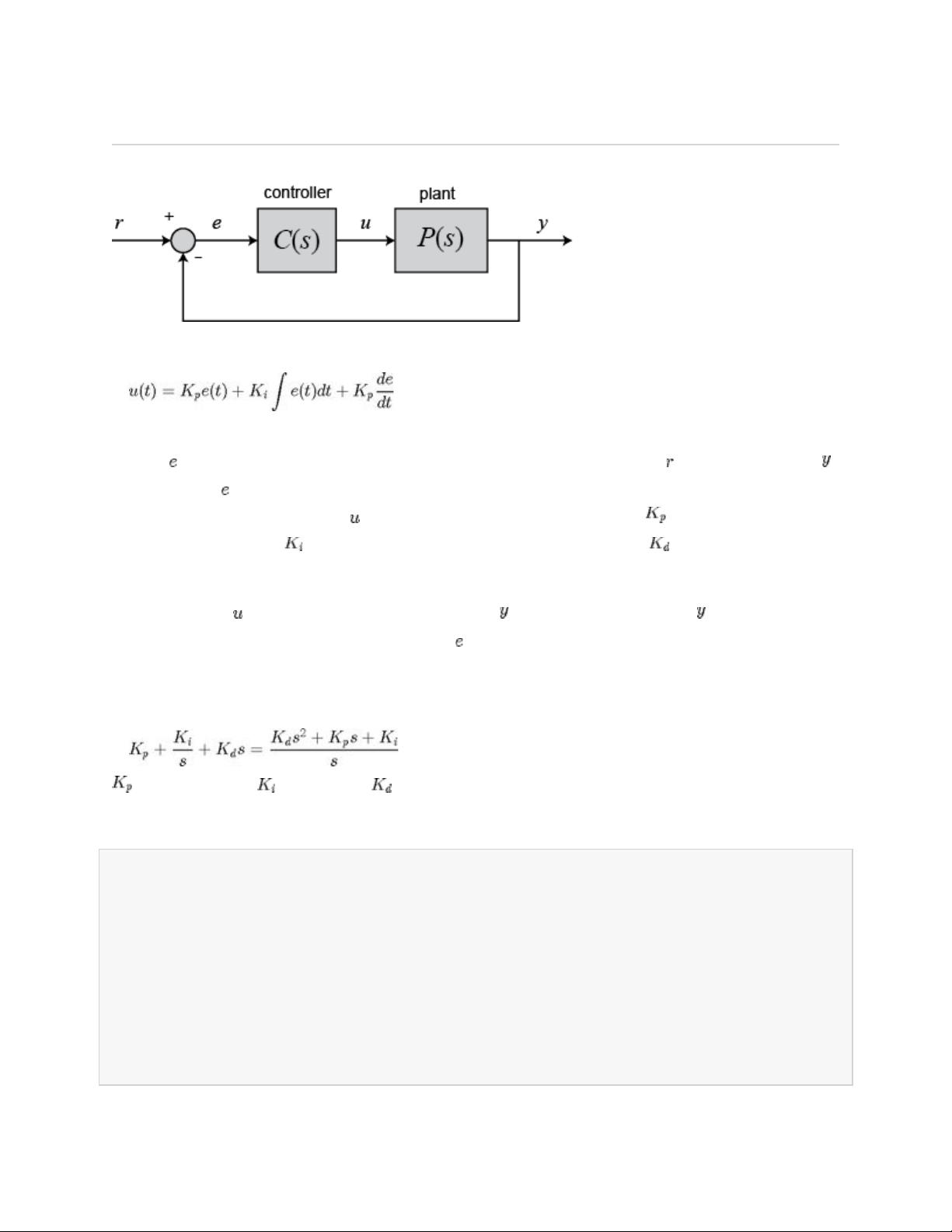
)*) )*) )*$$
+,-&-./
Kp = 1;
Ki = 1;
Kd = 1;
s = tf('s');
C = Kp + Ki/s + Kd*s
剩余17页未读,继续阅读
资源评论


kunlaurel
- 粉丝: 2
- 资源: 7









最新资源
- 《灵活、有效、快速的交叉视步态识别网络》(毕业设计,源码,教程)简单部署即可运行。功能完善、操作简单,适合毕设或课程设计.zip
- 《使用 Point Light Animation 分析和识别红外步态序列》(毕业设计,源码,教程)简单部署即可运行。功能完善、操作简单,适合毕设或课程设计.zip
- 《使用深度 CNN 对人体进行距离识别》(毕业设计,源码,教程)简单部署即可运行。功能完善、操作简单,适合毕设或课程设计.zip
- 《通过WiFi信号的信道状态信息(CSI)进行步态特征提取,进而实现用户识别》(毕业设计,源码,教程)简单部署即可运行。功能完善、操作简单,适合毕设或课程设计.zip
- 《使用智能手机加速度计进行步态识别》(毕业设计,源码,教程)简单部署即可运行。功能完善、操作简单,适合毕设或课程设计.zip
- 《使用预训练模型进行步态识别和人体姿势估计的深度神经网络结构》(毕业设计,源码,教程)简单部署即可运行。功能完善、操作简单,适合毕设或课程设计.zip
- 《在野外使用智能手机进行基于深度学习的步态识别》(毕业设计,源码,教程)简单部署即可运行。功能完善、操作简单,适合毕设或课程设计.zip
- 《一个灵活且可扩展的步态识别框架。可以专注于设计自己的模型并与最先进的模型轻松进行比较。》(毕业设计,源码,教程)简单部署即可运行。功能完善、操作简单,适合毕设或课程设计.zip
- VIENNA整流器仿真模型:零序注入SVPWM调制方式下中点点位平衡,电网电压电流同相位,THD含量优化至低于5%,Vienna整流器仿真模型:零序注入SVPWM调制方式下的中点点位平衡及电网电压电流
- 单相PWM整流Simulink仿真:高功率因数,低纹波输出,电流总谐波失真<5%,开关频率达20kHz ,单相PWM整流Simulink仿真:高效能参数优化设计 输入电压220V有效值,输出电压50
- DeepSeek从入门到精通(103页 PPT).pptx
- 风光水火储多能互补协调优化调度策略:降低负荷峰谷差,提升可再生能源消纳与火电机组经济性能,风光水火储多能互补系统的分层协调优化调度策略实现,计及调峰主动性的风光水火储多能系统互补协调优化调度 摘要:代
- DeepSeek大模型分享与展望.pptx
- MATLAB在湍流模拟中绘制Zernike相位屏的研究与应用,MATLAB算法在Zernike湍流相位屏可视化中的应用,MATLAB绘制Zernike湍流相位屏 ,MATLAB; Zernike湍流相
- 基于S7-1200 PLC控制的自动锅炉加热系统设计与仿真:全程温控及循环加热水处理工程实践,基于S7-1200 PLC的智能自动锅炉加热系统设计与仿真:从底部至顶部的温度控制与水循环过程,基于S7
- 用于手语识别的基于步态能量图像的系统.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


