Contents
1. Introduction ........................................................................................................................................... 5
2. Principle of Radio Navigation ............................................................................................................... 6
3. GPS Ephemeris Parameter .................................................................................................................... 9
4. GPS Errors .......................................................................................................................................... 11
4.1 Ionospheric Error ........................................................................................................................ 12
4.2 Troposphere Error ....................................................................................................................... 13
4.3 Satellite Clock Error.................................................................................................................... 14
5. Simulation & GPS Toolbox ................................................................................................................ 15
5.1 Calculation of satellite position ................................................................................................... 21
5.1.1 Mfile Simulation- SV_Ephemeris_Model .......................................................................... 22
5.2 Ionospheric Error ........................................................................................................................ 23
5.2.1 Mfile Simulation -Error_Ionospheric_Klobuchar ............................................................... 24
5.3 Tropospheric Error ...................................................................................................................... 25
5.3.1 Mfile Simulation - Error_Tropospheric_Hopfield .............................................................. 26
5.4 Satellite Clock Error.................................................................................................................... 27
5.4.1 Mfile Simulation - Error_Satellite_Clock_Offset & Error_Satellite_Clock_Relavastic .. 29
5.5 Result Plot ................................................................................................................................... 30
6. Reference ............................................................................................................................................ 31
7. Appendix ............................................................................................................................................. 32
7.1 Main Mfile .................................................................................................................................. 32
7.2 Error_Satellite_Clock_Offset ..................................................................................................
.... 33
7.3 Error_Satellite_Clock_Relavastic ............................................................................................... 34
7.4 Error_Ionospheric_Klobuchar .................................................................................................... 34
7.5 Error_Tropospheric_Hopfield ..................................................................................................... 36
7.6 Gen_G_DX_XYZ_B .................................................................................................................. 37
7.7 plot_Orbit .................................................................................................................................... 38
7.8 Main ............................................................................................................................................ 40
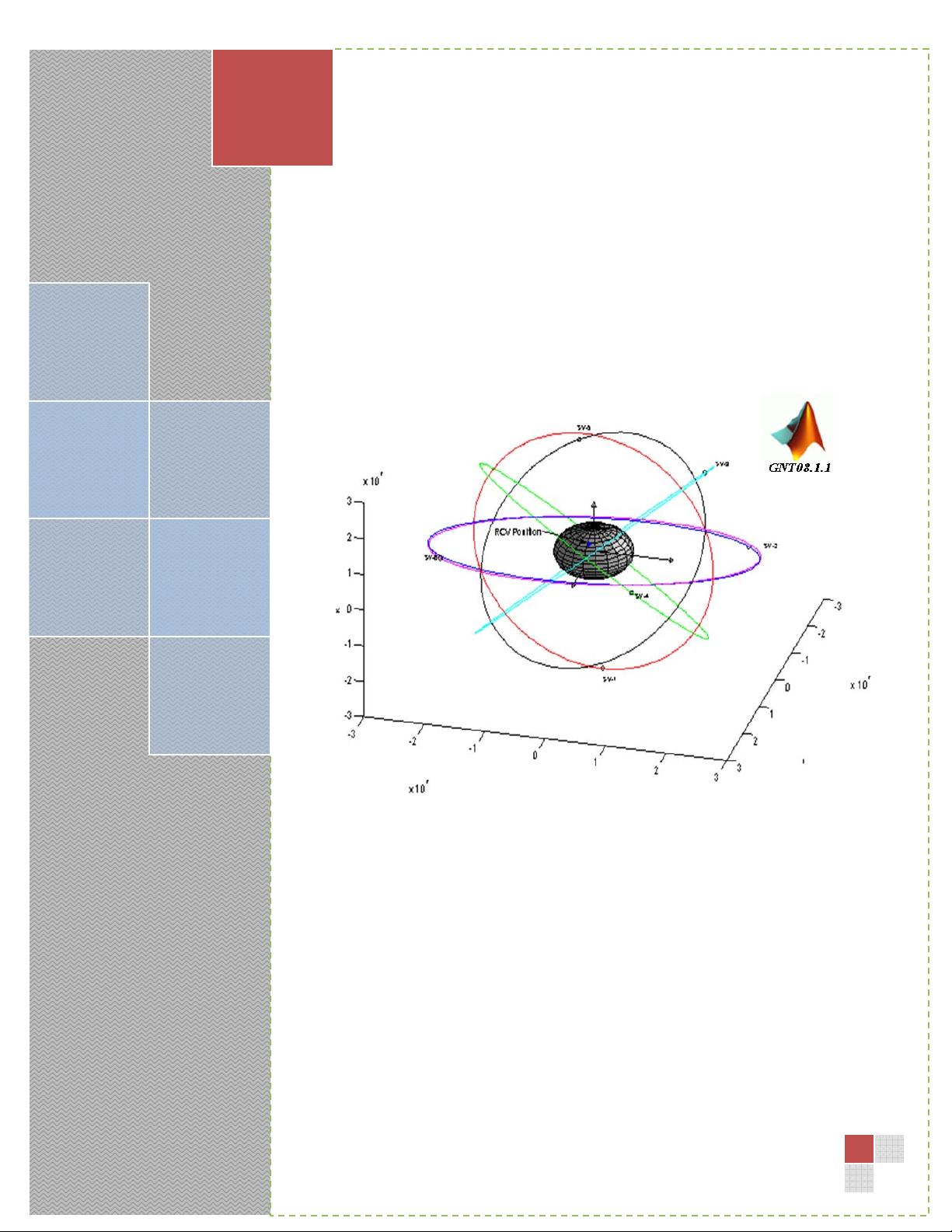
GPS Navigation Toolbox
GNT08.1.2
2008
By:MoeinMehartash
EngineeringandComputerScience
GPSNavigationToolbox