
小组成绩 小组成员 个人成绩
姓名 学号
0910200303
09102003
09102003
09102003
评语
一. 清楚描述轮式灭火机器人应用的场合,以及机器人的主要功能:
近年来,随着城市进程大大加快,城市越来越拥挤,不可避免的因为一些消防意识的
淡薄而引发火灾,火灾危险性较大,发生火灾有毒气浓度高,火灾扑灭难度大等困难,尤
其在可燃物,易燃物集中,客流量大的商场,发生火灾时,火势蔓延快,人员疏散困难,
如果不能及时控制火势,后果将不堪设想。所以灭火机器人应运而生。
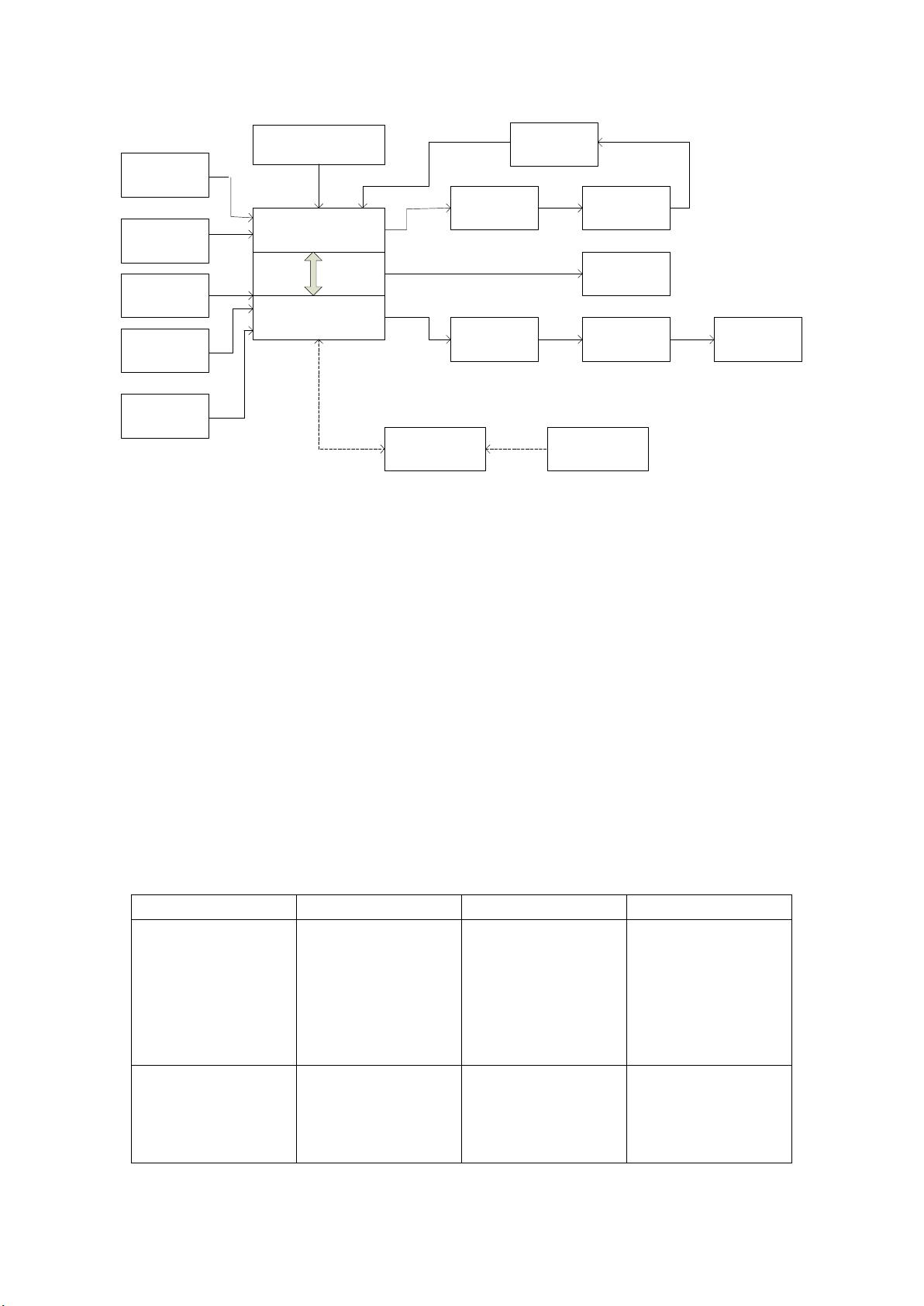
灭火机器人基本功能主要包括以下几点:
(1) 移动功能。这是移动机器人的基本功能,要求机器人能够靠近火灾现场。
(2) 消防功能。这是机器人的主要功能。机器人在进入灭火射程时,根据遥控指令
或者自身传感器的信息能够喷射灭火剂进行灭火。
(3) 观察功能。这是消防人员了解火灾现场集体情况,有效组织消防对策,利用灭
火机器人进行灭火的辅助功能。在接近货源和进行灭火作业的过程中,凭借防
止在灭火器本体前部和消防水枪伺服平台上的两台摄像机,消防人员可以根据
火灾现场的实际情况最佳灭火方法。
(4) 自我保护功能。这是灭火机器人可靠完成其灭火功能的附加功能。一般来说,
火灾现场较为复杂,灭火机器人在进行灭火作业时会遇到意想不到的情况。地
下商场机器人可以根据内部温度启动冷却功能,并对冷却强度进行调整,机器
人外壳能够承受住某些坚硬物体的撞击,当碰到影响灭火和危机自身安全的意
外情况时能够发出相应的报警信号。
(5) 探测功能。消防机器人可以根据需要采集火灾现场的各项数据(如火场温度,
辐射强度,有毒气体的种类及浓度)并能够对数据进行记录或者处理。
(6) 通讯功能。为使灭火机器人可靠完成上述功能而设置的必要功能。主要用于发
布遥控指令,回传摄像机的视屏信号和现场采集的数据。



剩余50页未读,继续阅读
资源评论


tili
- 粉丝: 0
- 资源: 3









最新资源
- 一个相当完整的与 VB6 兼容的 DirectX 11 类型库.zip
- 一个用 DirectX11 编写的 helloworld OpenVR 程序 .zip
- 一个玩具 c++,directX 游戏引擎 .zip
- 基于计算机视觉yolov5算法实现小鼠肿瘤块检测及尺寸大小预测系统python源码+模型+测试数据.zip
- QML系统整机测试模板,包含磁盘阵列RAID管理、系统压力测试、整机拷机测试、日志收集、用户权限管理
- NVIDIA GeForce 7 Series显卡驱动下载
- 一个正在开发的现代 C++20 跨平台游戏引擎,带有 C# 脚本 .zip
- sssssssseffffffffffssdddd
- 使用kettle完成数据集管理.pptx
- 一个挂接 DirectX 并显示简单 AntTweakBar 菜单的示例项目 .zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


