

运动仿真
本章主要内容:
z 运动仿真的工作界面
z
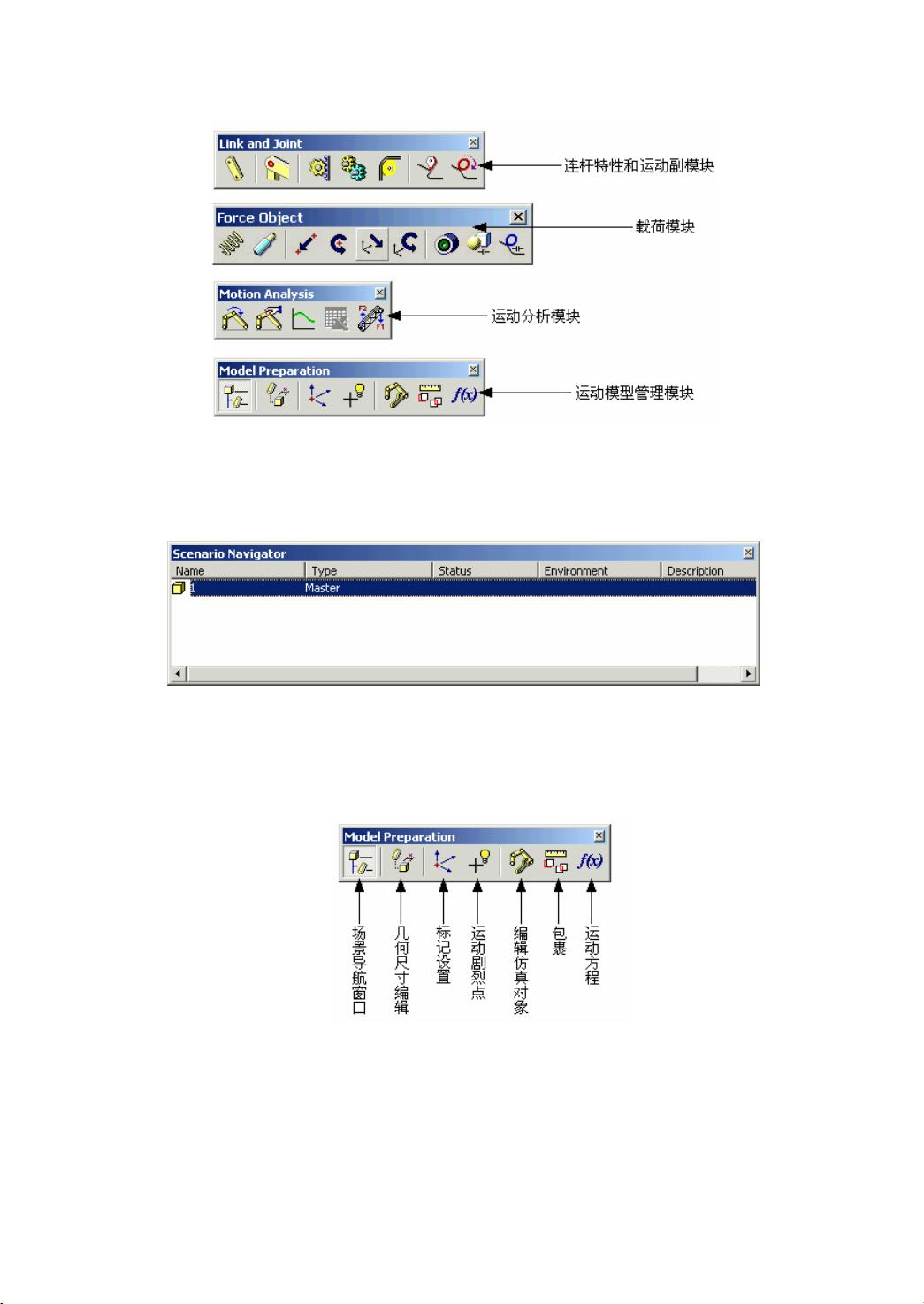
运动模型管理
z
连杆特性和运动副
z
机构载荷
z
运动分析
9.1 运动仿真的工作界面
本章主要介绍 UG/CAE 模块中运动仿真的功能。运动仿真是 UG/CAE(Computer Aided
Engineering)模块中的主要部分,它能对任何二维或三维机构进行复杂的运动学分析、动力
分析和设计仿真。通过 UG/Modeling 的功能建立一个三维实体模型,利用 UG/Motion 的功能
给三维实体模型的各个部件赋予一定的运动学特性,再在各个部件之间设立一定的连接关系
既可建立一个运动仿真模型。UG/Motion 的功能可以对运动机构进行大量的装配分析工作、
运动合理性分析工作,诸如干涉检查、轨迹包络等,得到大量运动机构的运动参数。通过对
这个运动仿真模型进行运动学或动力学运动分析就可以验证该运动机构设计的合理性,并且
可以利用图形输出各个部件的位移、坐标、加速度、速度和力的变化情况,对运动机构进行
优化。
运动仿真功能的实现步骤为:
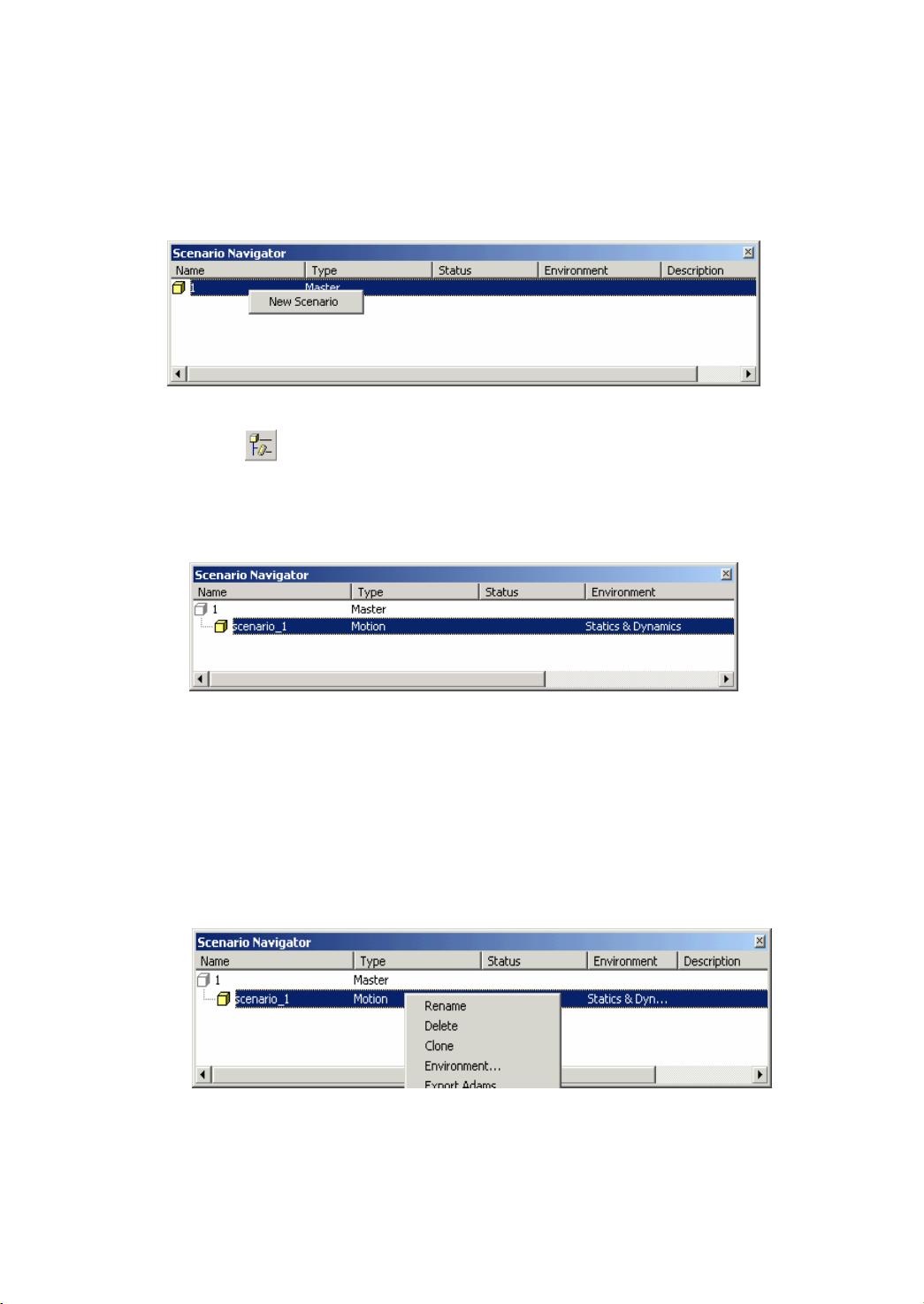
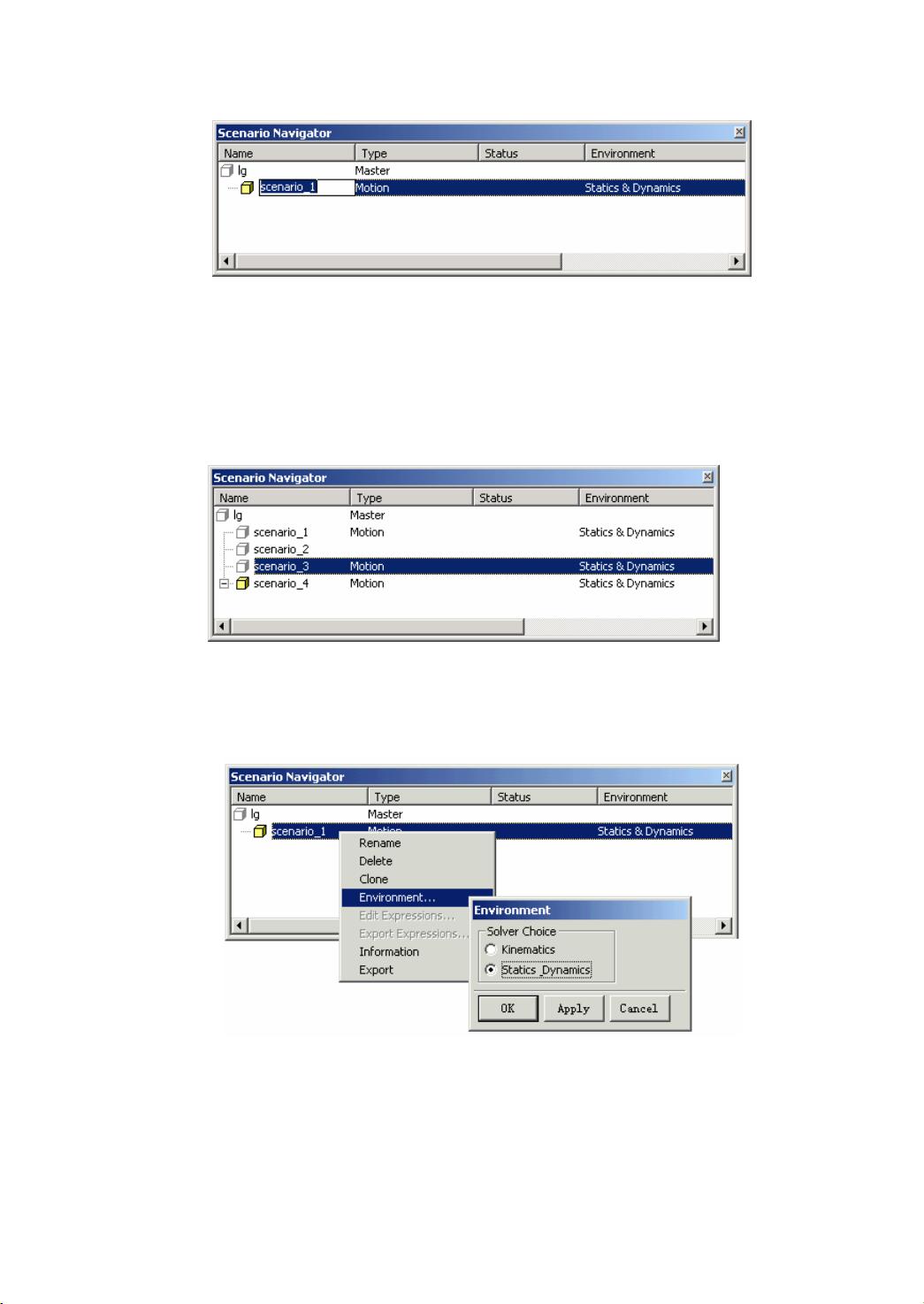
1.建立一个运动分析场景;
2.进行运动模型的构建,包括设置每个零件的连杆特性,设置两个连杆间的运动副和
添加机构载荷;
3.进行运动参数的设置,提交运动仿真模型数据,同时进行运动仿真动画的输出和运
动过程的控制;
4.运动分析结果的数据输出和表格、变化曲线输出,人为的进行机构运动特性的分析。
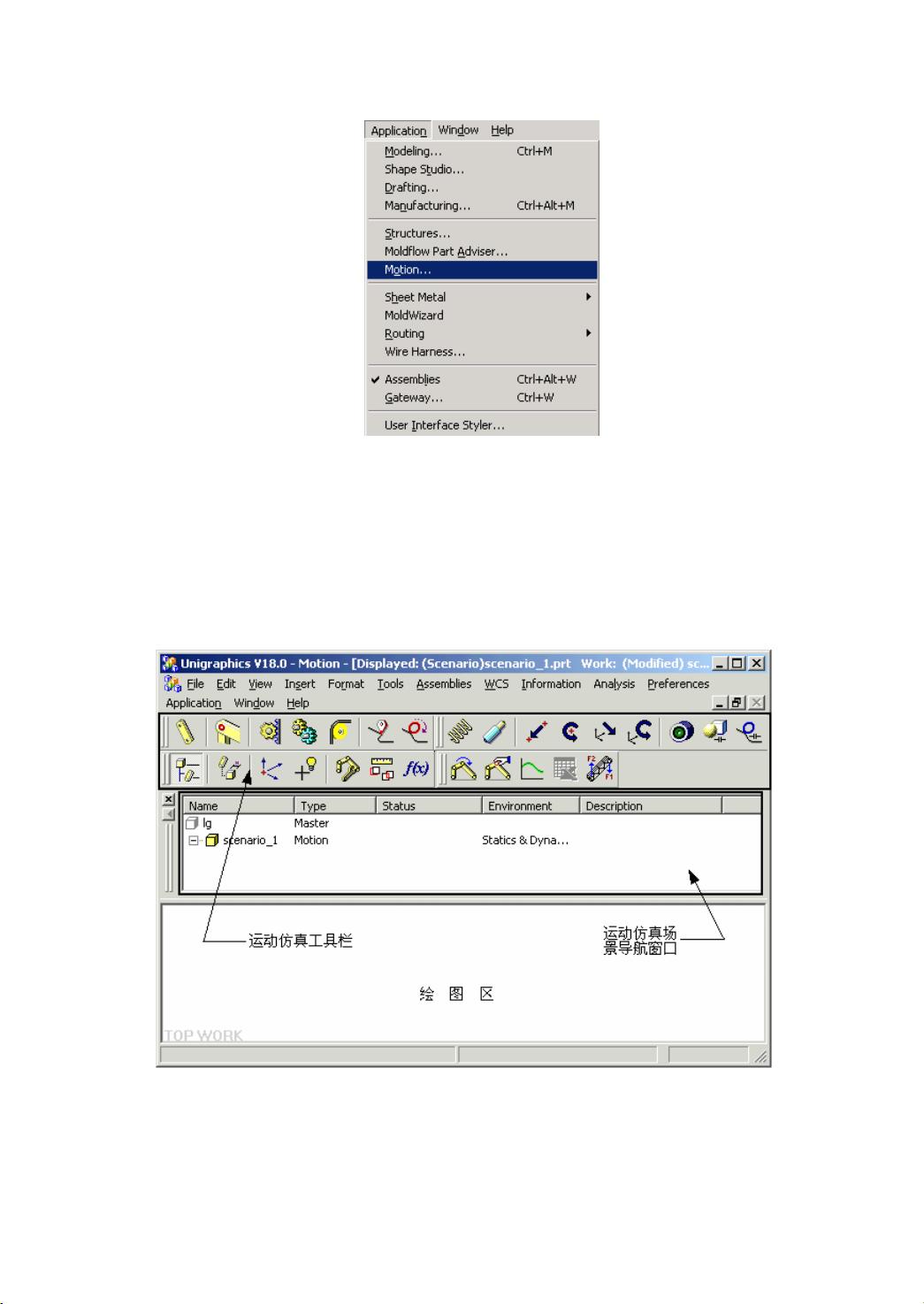
9.1.1 打开运动仿真主界面
在进行运动仿真之前,先要打开 UG/Motion(运动仿真)的主界面。在 UG 的主界面中
选择菜单命令【Application】→【Motion】,如图 9-1 所示。
剩余40页未读,继续阅读
资源评论


重庆凯文
- 粉丝: 0
- 资源: 1









最新资源
- (cuda12.4)causal-conv1d-cuda.cp310-win-amd64.pyd
- comsol多物理场仿真,电磁热分析,损耗计算,微波仿真
- 基于Windows的MFC标准框架开发的简易画图工具,可以作为C++语言、面向对象编程、MFC框架的学习练手.zip
- 课程设计 基于Python+tkinter+SQLServer实现的图书管理系统源码
- COMSOL代做 声子晶体仿真,一维,二维,三维能带图,带隙图,色散曲线,弹性波,声波
- C++-植物大战僵尸MFC版本-2025
- (cuda12.4)causal-conv1d-1.1.1-cp310-cp310-win-amd64.whl
- CAD贱人工具箱6.0免注册版
- 西门子1500 大型程序fanuc 机器人汽车焊装自动生产线程序 MES 系统通讯 大型程序fanuc机器人汽车焊装自动生产线程序程序经典结构清晰,SCL算法堆栈,梯形图和 SCL混编使用博图 V1
- 基于Hadoop平台的微博数据挖掘系统的设计与实现
- 字节跳动大模型应用实践与分享
- 20250110春节假期
- 甄嬛传之《我爱上班》诗朗诵PPT模版.pptx
- (Vim cuda12.4)selective-scan-cuda.cp310-win-amd64.pyd
- 异步电机按转子磁链直接定向SVPWM矢量控制仿真模型Matlab Simulink模型,含详细说明文档 仿真主体分为三个模块:主电路逆变模块、转子磁链定向控制模块和SVPWM模块 根据陈伯时运动控
- 字节跳动Agent企业专属AI应用创新平台
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


