

Evolutionary Rob ots with Fast Adaptive
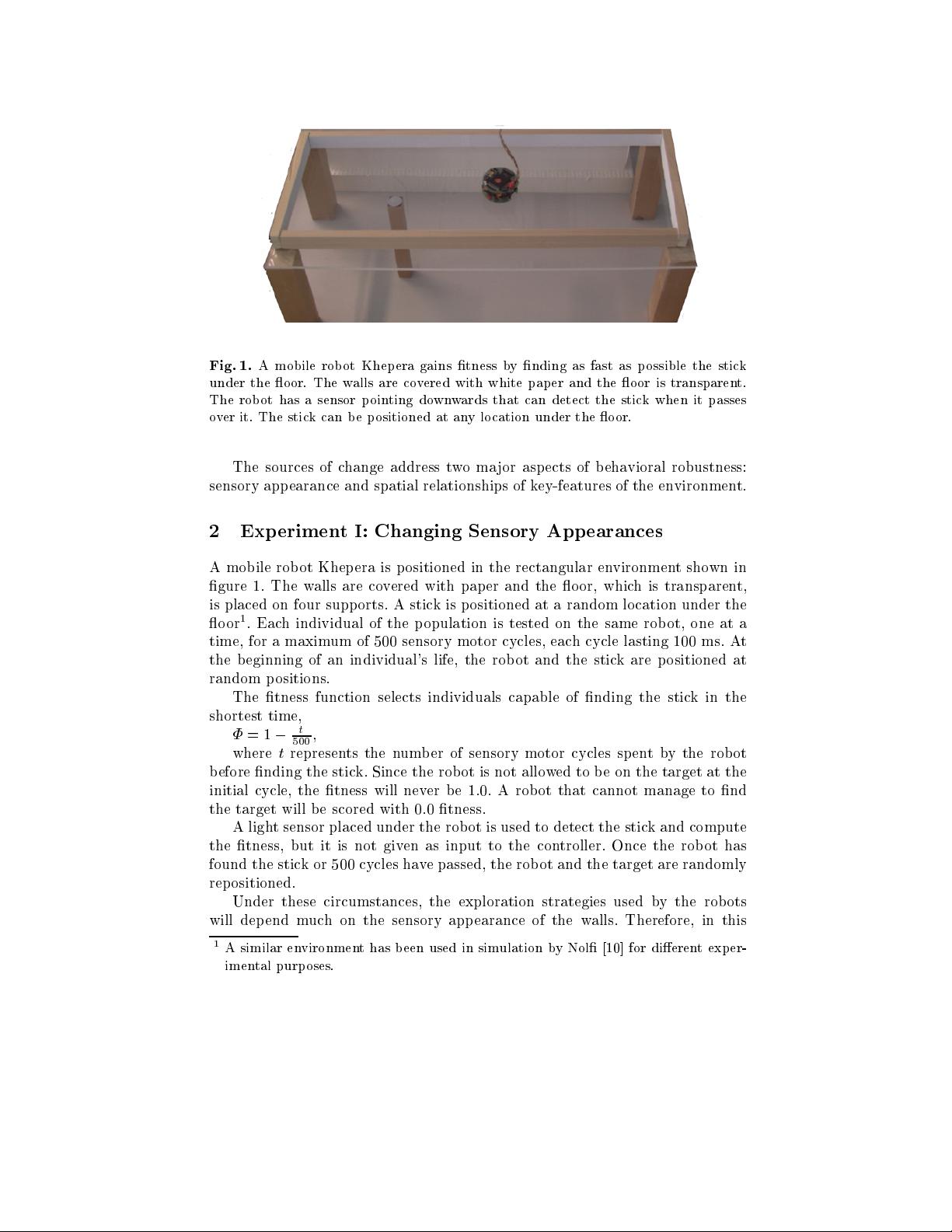
Behavior in New Environments
Joseba Urzelai and Dario Floreano
Laboratory of Microprocessors and Interfaces (LAMI)
Swiss Federal Institute of Technology, CH-1015 Lausanne (EPFL)
Joseba.Urzelai@epfl.ch, Dario.Floreano@epfl.ch
Abstract.
This paper is concerned with adaptation capabilities of evolved
neural controllers. A metho d consisting of encoding a set of lo cal adap-
tation rules that synapses ob ey while the rob ot freely moves in the en-
vironment [6] is compared to a standard xed-weight network. In the
experiments presented here, the p erformance of the rob ot is measured in
environments that are dierent in signicantways from those used dur-
ing evolution. The results show that evolutionary adaptive controllers
can adapt to environmental changes that involve new sensory charac-
teristics (including transfers from simulation to reality) and new spatial
relationships.
1 Evolution and Adaptation
Evolutionary algorithms are widely used in autonomous rob otics in order to solve
a large variety of tasks in several kind of environments. However, evolved con-
trollers become well adapted to environmental conditions used during evolution,
but often do not perform well when conditions are changed. Under these circum-
stances, it is necessary to carry on the evolutionary process, but this mighttake
long time.
Combination of evolution and learning has been shown to b e a viable solution
to this problem by providing richer adaptive dynamics [1] than in the case where
parameters are entirely genetically-determined. A review of the work combining
evolution and learning for sensory-motor controllers can b e found in [5, 9].
Instead of simply combining o-the-shelf evolutionary and learning algo-
rithms, in previous work we presented an approach capable of generating adap-
tive neural controllers by evolving a set of simple adaptation rules [6]. The
method consists of enco ding on the genotype a set of mo dication rules that
perform Hebbian synaptic changes [2{4] through the whole individual's life. The
results showed that evolution of adaptive individuals generated viable controllers
in much less generations and that these individuals displayed more p erformant
behaviors than genetically-determined individuals.
In this pap er, we describ e two new sets of exp eriments conceived to measure
the
adaptation
capabilities of this approachinenvironments that are dierent
from those used during evolution. The results are compared to standard evolution
of synaptic weights and to evolution of noisy synaptic weights (control condition).
剩余10页未读,继续阅读
资源评论













