1.ロボットインタフェース概要
- 1 -
ロボットインタフェース概要1
FANUC ロボットインタフェース(モジュール名 FRRJIF.DLL)は、イーサネット上でロボットの次のデータにアクセスするため
ランタイムモジュールです。
O、現在位置、数値レジスタ、位置レジスタ、システム変数、プログラム実行状態、アラーム
O、数値レジスタ、位置レジスタ、システム変数
このモジュールを
用して Windows 上でロボットのデータにアクセスするユーザアプリケーションを作成することができます。
す。
内蔵 PMC の K 領域、R 領域、D 領域を参照・設定することもできます。)
まとめて読み込みます。これを DataTable の Refresh と呼びます。次に Refresh するまで参照したデータ値を保持しま
taTable には同時に80個まで登録できます。DataTable.AddCurPos など DataTable.AddXXX を80回呼ぶことができま
。
ュー
クセスことはできません。複数の PC やアプリケーションから 1 台のロボットに Connect した場合、動作
保証されません。
USB プロテクタ付き(A08B-9410-J579)のいずれかを PC1 台に付き
1パッケージご購入いただく
要があります。
登録キーを発行します。FANUC ロボットインタフェース
いた時の FANUC セールス担当
に
/FANUC Robotics/ Robot Interface Protect Check) でプロテクト状態を確認できます。(登録キーは発行いたし
せん。)
、TPプログラムなどのファイルの転送機能は含んでおりません。 ロボットとのファイルの
御装置のイーサネット機能の詳細については、お使いのロボット制御装置のイーサネット機能 取扱説明書をご
下さい。
の
<参照>
I/
<設定>
I/
FRRJIF.DLL は ActiveX DLL で、Visual Basic、Visual C++からオブジェクトとして参照することができます。
使
I/O に関しては、FRRJIF.Core オブジェクトから参照、設定することができま
(
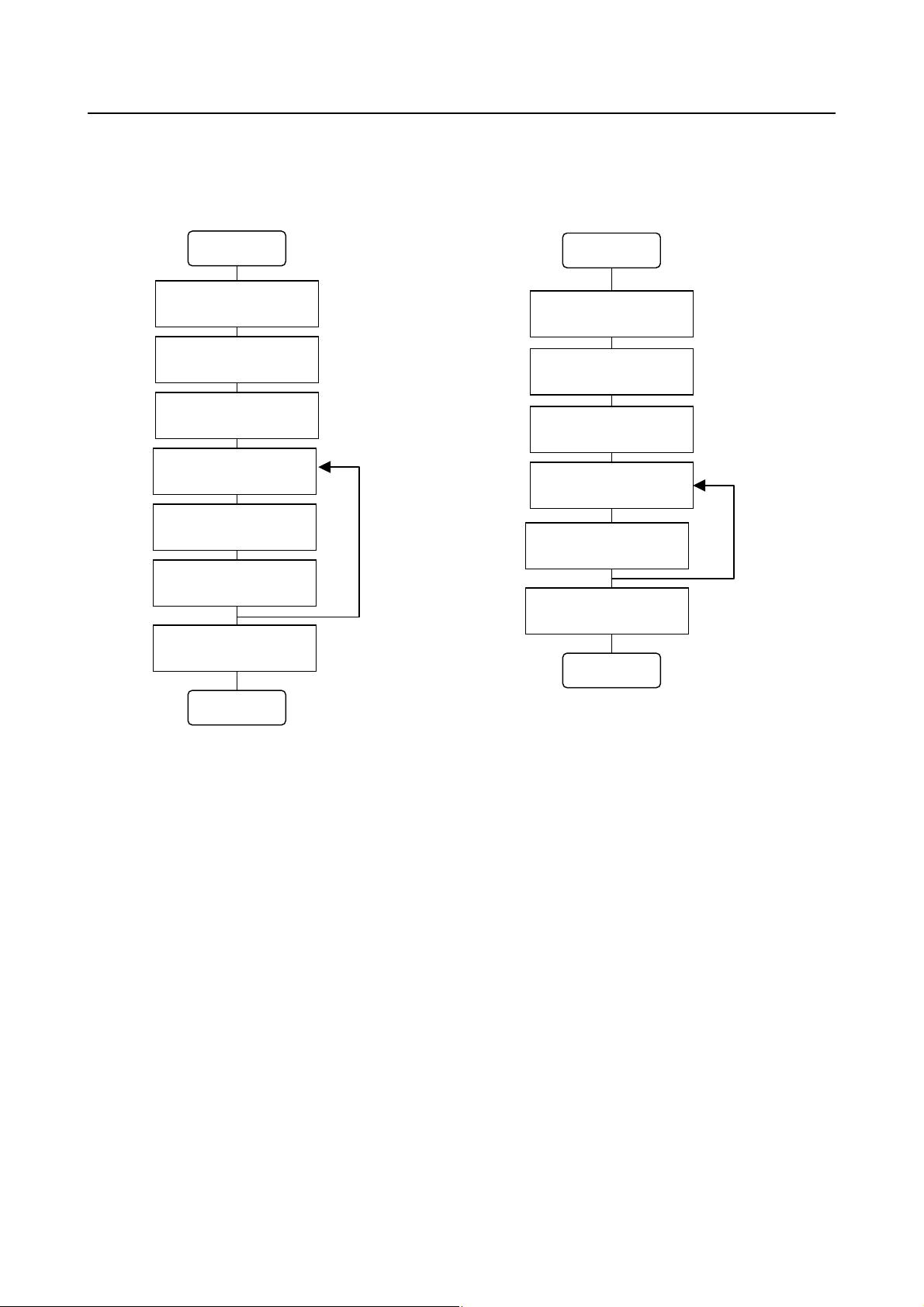
現在位置、レジスタ、位置レジスタ、システム変数、プログラム実行状態、アラーム履歴に関しては、参照したいデータを
DataTable オブジェクト(FRRJIF.Core.DataTable)にあらかじめ登録します。参照するときは、DataTable に登録されたデータを
1 度に
す。
(*) DataTable を用いるのは、アクセス時間短縮のため参照するデータをまとめて 1 度に読み込むためです。
(*) Da
す
FANUC ロボットインタフェースは、ロボット1台につき同時に1つだけ通信を Connect することができます。複数のコンピ
タから1台のロボットに同時にアクセスしたり、1つのコンピュータ上の複数のアプリケーションから1台のロボットに同時に
別々に Connect してア
は
開発用 PC1 台に付き FANUC ロボットインタフェース(A08B-9410-J575)を1パッケージご購入いただく必要があります。ライ
センスの追加分に関しては FANUC ROBOT インタフェース ランタイムライブラリ(A08B-9410-J576)、FANUC ROBOT インタ
フェース ランタイムライブラリ ハードウェアプロテクトキー付き(A08B-9410-J578)、
FANUC ROBOT インタフェース ラ
ンタイムライブラリ
必
FANUC ロボットインタフェースおよび FANUC ROBOT インタフェース ランタイムライブラリは、インストールしてから 30 日間
以内に登録キーの入力が必要です。登録キーを入力しないと、プロテクトが掛かり使用できなくなります。(Connect に失敗し
ます)FANUC ロボットインタフェースを1パッケージご購入に対し、1 つの
をインストールして使用する PC1 台毎に 1 つの登録キーが必要です。
登録キーを入力するためには、License Manager (タスクバー スタート/プログラム/FANUC Robotics/License Manager)を
起動します。ここに表示される Robot Interface(RTL-ROBOTIFEM)の Software Code を購入頂
通知しますと登録キーを取得することができます。登録キー入力後、再起動してください。
またはランタイムライセンスとしてハードウェアプロテクトキー付き(プリンタポートタイプ)、USB プロテクタ付き FANUC ロボ
ットインタフェースを購入した場合は登録キーの入力は必要ありません。Robot Interface Protect Check (タスクバー スタート
/プログラム
ま
(*) FANUC ロボットインタフェースは
転送には、FTPをお使いください。
(*) ロボット制
覧