动态规划是一种强大的算法,常用于解决复杂的问题,如最优化问题。在本实验报告中,主要探讨了如何利用动态规划算法解决多段图的最短路径问题。动态规划的核心思想是将复杂问题分解为一系列相互关联的子问题,并通过解决这些子问题来找到原问题的最优解。
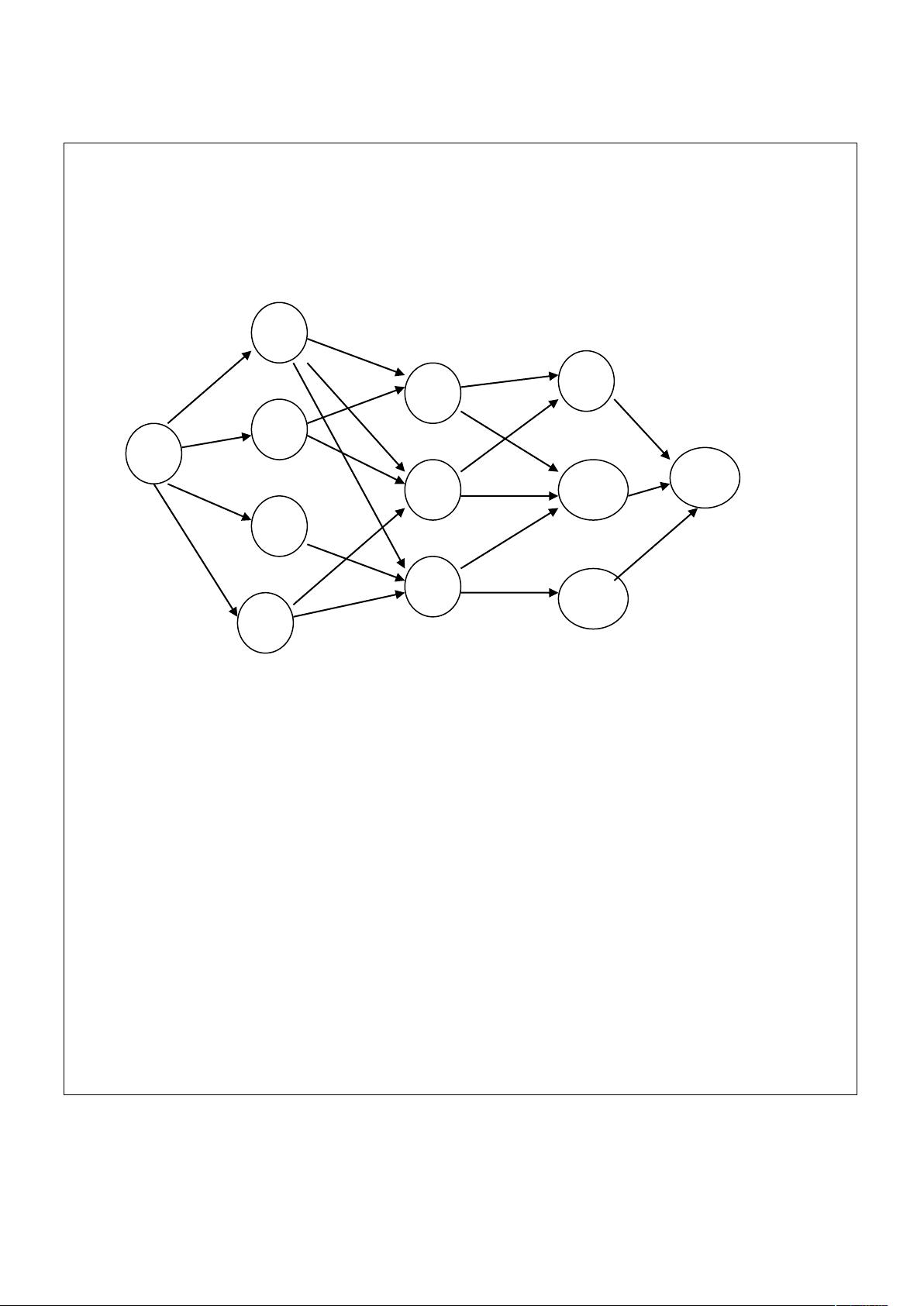
实验内容涉及编程实现动态规划算法,具体是解决一个具有12个顶点(n=12)和5段(k=5)的图的最短路径问题。在动态规划中,最短路径问题通常可以通过Dijkstra算法或Floyd-Warshall算法解决,但实验采用了自定义的方法。
实验目的旨在帮助学生理解动态规划的基本概念,包括最优子结构性质和子问题的重叠性质。最优子结构表明,一个问题的最优解可以通过其子问题的最优解构建。子问题的重叠性质则意味着某些子问题会被重复计算,因此需要通过记忆化技术避免重复工作,提高效率。
实验分析部分展示了两个关键函数:`fgraph`(向前递推算法)和`bgraph`(向后递推算法)。这两个函数都用于求解最短路径,但方向相反。向前递推从源节点开始,逐层向前计算到目标节点的最短路径;向后递推则从目标节点开始,反向计算到源节点的最短路径。它们都通过遍历图的邻接矩阵`c`来找到最小成本的路径,并更新路径数组`path`和距离数组`d`。
在实验实现中,`init`函数用于初始化图的邻接矩阵,将所有边的初始成本设为最大值`MAX`,然后设置实际的边成本。`fgraph`和`bgraph`函数通过循环遍历每个节点,寻找与当前节点相邻且具有最小成本的边,进而更新最短路径和距离。在向前递推算法中,路径的最后一个节点被设定为目标节点,而向后递推算法则从目标节点开始,逐步回溯至源节点。
实验结果部分并未给出具体细节,但可以预期的是,通过运行此程序,应该能够得到从源节点到目标节点的最短路径以及相应的路径成本。
实验总结强调了动态规划算法的重要性,它将多阶段决策问题逐步转化为单阶段决策的优化,最终得到全局最优解。实验过程中,通过不断调试和完善,确保程序正确并有效地执行,得到了期望的结果。
附录A提供了完整的C++代码,其中包括定义图的邻接矩阵、初始化函数、向前递推和向后递推的函数实现,以及必要的头文件和常量定义。
这个实验报告深入浅出地介绍了动态规划算法的应用,特别是如何解决多段图的最短路径问题,对理解和实践动态规划算法有着重要的指导意义。