
第 1 页 共 25 页
《深度剖析 BREW 实现原理》——BREW 原理
我们 PC 的 Windows 操作系统功能是如此的强大,以至于我们可以获得任何一个我
们想要的程序,任何一个人都可以为 Windows开发应用程序,或者给自己,或者为他人。
而这一切源于操作系统的开放性和硬件平台的不断发展,尤其是存储器的发展,使得我们在
编写程序的时候不必在意需要多大的存储空间了。
然而,嵌入式系统可就没那么幸运了。至今为止,在嵌入式系统里仍然没有一个能够
像 Windows 这样应用如此广泛的操作系统,也没有可以不考虑存储空间的硬件平台。在 数
以 亿计的嵌入式设备使用者中,都 还 在用着一成不变的应用程序,单调同时也令人乏味。我
们能不能也像在 Windows 下面一样,在嵌入式系统中可以安装应用程序呢?应该怎样克服
嵌入式系统的限制而实现这个功能呢?
有梦想才会不断的追求!我们知道,在 Windows 中程序都是以文件的形式存储在文
件系统中的,然后通过操作系统控制这些程序的运行,我们可以说它的程序是“分散式”的。
而在嵌入式系统中通常是将程序烧录在一个 Flash 芯片中,文件系统在另一个 Flash 芯片
中(也可以二者在同一个芯片中),CPU 是直接从程序 Flash 芯片中读取指令执行的,没
有经过文件系统,我们可以叫这种程序是“一体式”的。Windows 的“分散式”程序体通过文
件的形式存在,可以把程序的不同部分分割成不同的文件,当我们只需要更新一个模块内容
的时候,只更新这个文件就可以了。熟悉它的朋友们可能已经知道了,这个文件就是在
Windows 操作系统中的 DLL 文件。这样的方式可以很容易的实现程序分发,这给了我们
一个很好的启示:嵌入式系统中也有文件系统,把程序放在文件系统里不就可以了吗?真是
个好主意!
在我们庆幸找到了好方法的时候,问题不偏不倚地出现了:系统如何运行文件系统中
的程序,文件中的程序又如何调用平台中的函数?要实现“分散式”的程序运行,这 两 个 问题
是必须要解决的,而其中第二个问题就更为重要了。或 许您现在还不是十分的明白这些问题
的意义,不要着急,这一章里我会逐一的向您讲解如何理解并解决这两个问题。当然,现在
我们知道 BREW 已经在嵌入式系统中解决了这两个问题,从现在开始就让我们沿着开发者
的足迹去追寻 BREW 的本质吧。
1.平台的作用
如果想要清楚的了解我们在嵌入式系统中所面临的问题,那么我们就首先需要了解
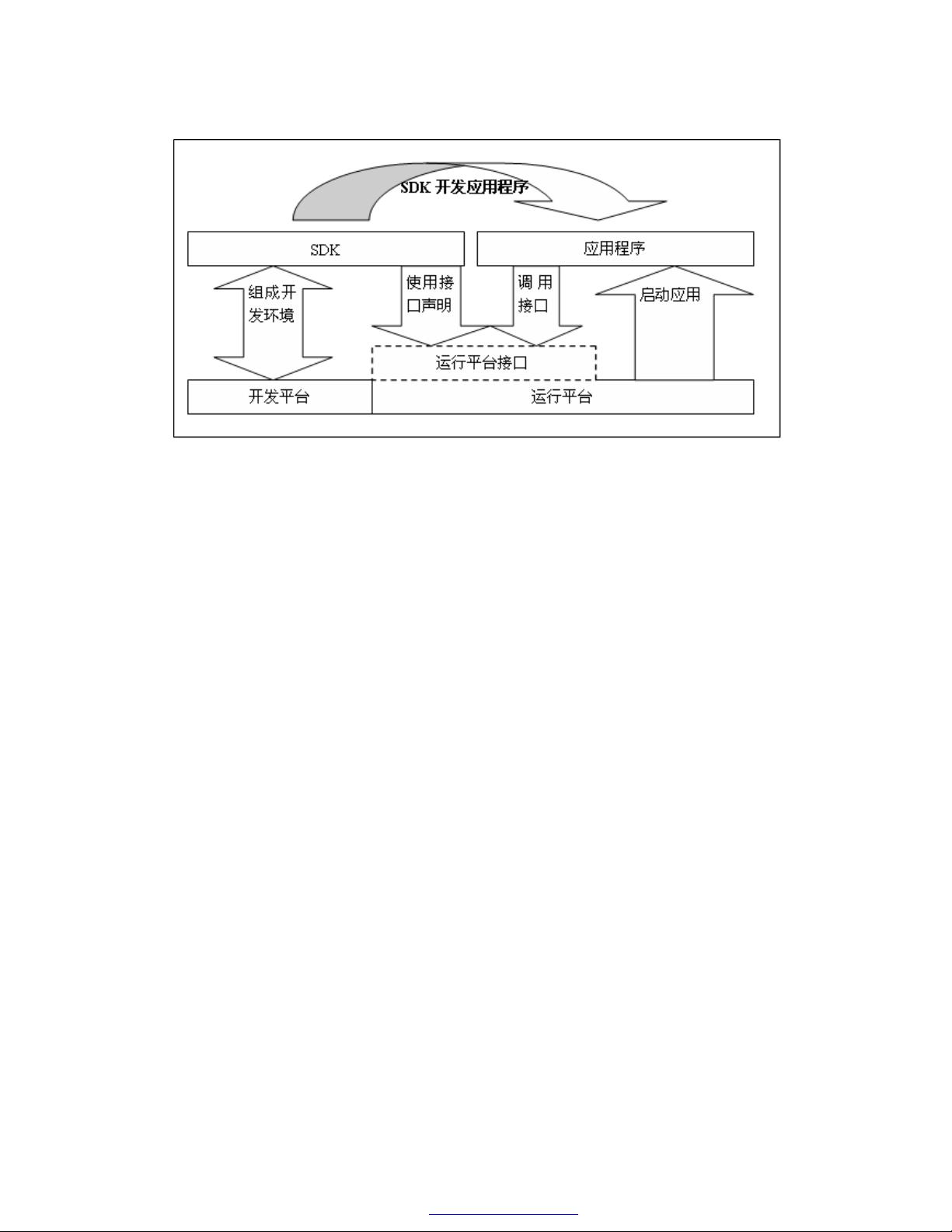
“分散式”系统的结构。一个“分散式”系统需要有三个部分组成:平台、软 件开发工具包
(SDK: Software Development Kit)和应用程序。“分散式”应用程序的运行需要平台的
支持,就像是 DLL 文件只有在 Windows 操作系统平台下才有作用,而 到 了 Linux 平台则不起
任何作用一样;应用程序则通过 SDK 进行开发,开发出的源程序经过编译之后可以运行在运
行平台之上。平台又分为开发平台和运行平台,开发平台是 SDK 运行的平台,用 来 开发可以
在运行平台上运行的应用程序,对于一些系统还会提供模拟运行平台的模拟器,以 便 于在没
有显而易见的运行设备的时候也可以看到开发的效果;运行平台是应用程序运行的平台,它
提供应用程序运行的环境,同时肩负着控制应用程序的作用。开发平台和运行平台可以是同
一个平台,也可以两个不同的平台,比如现在的 Windows 平台的应用就可以使用 VC 等工具
开发基于 Windows 的应用程序,而 BREW SDK 则是运行在 Windows 环境下,但应用程序却在
PDF 文件使用 "pdfFactory Pro" 试用版本创建 www.fineprint.cn
剩余24页未读,继续阅读
资源评论


jiakun5893423
- 粉丝: 2
- 资源: 7









最新资源
- Java基于springboot的上课考勤系统源码+说明文档.zip文件
- 直流电机双闭环调速(p1-p2) 永磁同步电机电流滞环闭环调速(p3-p4) 永磁同步电机电流滞环与SVPWM调速对比(p5-p6) 异步电机滞环电流调速(p7-p8)
- Simulink仿真:基于SOC阈值控制策略的电池均衡(组内+组间) 参考文献:视频讲解 仿真平台:MATLAB Simulink 主要内容:利用boost-buck电路对6块电池进行组内均衡和组间均
- 软件项目+验收材料+编码方案
- 基于二阶自抗扰ADRC的轨迹跟踪控制,对车辆的不确定性和外界干扰具有一定抗干扰性,跟踪轨迹为双移线 有对应复现资料
- 基于滑膜控制smc的3辆协同自适应巡航控制,上层滑膜控制器产生期望加速度,下层通过油门和刹车控制车速,实现自适应巡航控制 个人觉得从结果图中看出基于滑膜控制的效果非常好,不亚于模型预测控制mpc
- Delphi 12 控件之DOCXReadWrite D11 D12
- 基于滑膜控制的后轮主动(ARS)和DYC的协调稳定性控制,上层根据模糊控制规则和滑膜控制产生期望后轮转角ARS和附加横摆力矩Mz,下层采用基于附着系数和车速对附加横摆力矩进行分配,控制效果良好,能实现
- Delphi 12 控件之Delphi in Depth - FireDAC.rar
- 基于微信小程序的校园互助系统源码+数据库.zip文件
- 四旋翼ADRC控制器仿真,已调好 已经生成C语言了,要放到单片机运行的伙伴可以拿去研究
- 毕业设计-基于Java+微信小程序的校园互助系统源码+数据库.zip文件
- 基于二次规划(QP)的路径规划和速度规划 matlab代码实现 + 详细文档 picewise jerk path picewise jerk speed 更新: c++版本已完成,qt可视化
- yolo+安全帽数据集+目标检测+机器视觉识别+6000张图片安全帽识别数据集
- 我的资料1234567890822368
- 毕业设计-基于Java+SpringBoot的校园互助系统微信小程序源码+数据库.zip文件
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


