Introduction to Mathematical Morphology


COMPUTER VISION, GRAPHICS, AND IMAGE PROCESSING 35, 283-305 (1986)
Introduction to Mathematical Morphology
JEAN SERRA
E. N. S. M. de Paris, Paris, France
Received October 6,1983; revised March 20,1986
1. BACKGROUND
As we saw in the foreword, there are several ways of approaching the description
of phenomena which spread in space, and which exhibit a certain spatial structure.
One such approach is to consider them as objects, i.e., as subsets of their space of
definition. The method which derives from this point of view is. called mathematical
morphology [l, 21. In order to define mathematical morphology, we first require some
background definitions.
Consider an arbitrary space (or set) E. The “objects” of this :space are the subsets
X
c
E; therefore, the family that we have to handle theoretically is the set 0 (E) of
all the subsets X of E. The set p(E) is incomparably less arbitrary than E itself;
indeed it is constructured to be a Boolean algebra [3], that is:
(i) p(E) is a complete lattice, i.e., is provided with a partial-ordering relation,
called inclusion, and denoted by “
c
.” Moreover every (finite or not) family of
members Xi E p(E) has a least upper bound (their union C/Xi) and a greatest
lower bound (their intersection f7 X,) which both belong to p(E);
(ii) The lattice p(E) is distributiue, i.e.,
xu(Ynz)=(XuY)n(xuZ) VX,Y,ZE b(E)
and is complemented, i.e., there exist a greatest set (E itself) and a smallest set 0
(the empty set) such that every X E p(E) possesses a complement Xc defined by the
relationships:
XUXC=E
and
xn xc= 0.
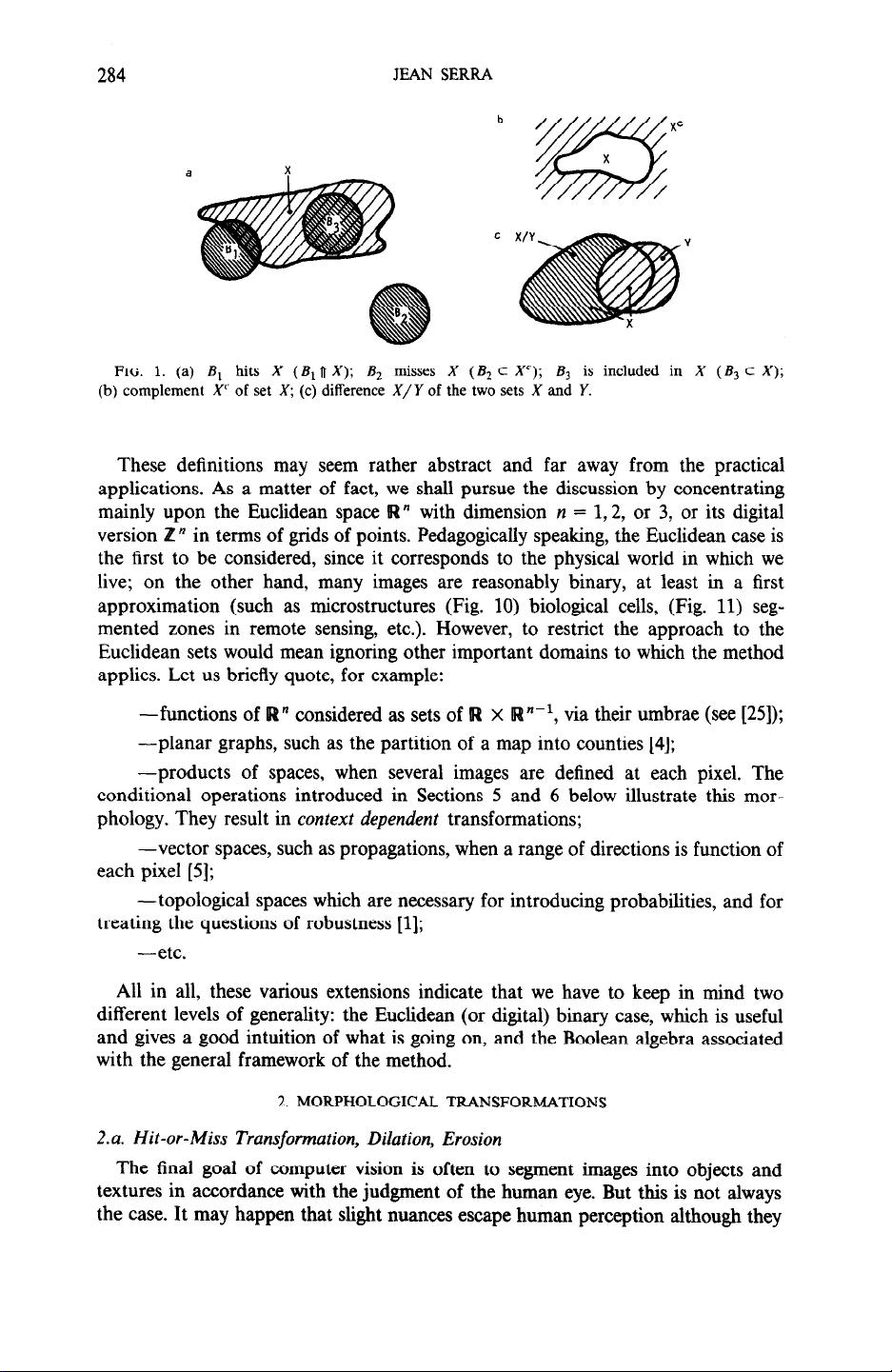
Given two sets X and Y E p(E), the notion of their set diference X/Y derives from
the intersection and the complement, as follows:
X/Y=Xn YC;
X/Y is the part of X which does not belong to Y (see Fig. lc). In brief, given two
sets B and X belonging to p(E), we may have (Fig. 1):
(a) B is included in X (notation: B c X)
(p) B hits X (notation: B fi X) meaning B
n X # 0
(y) B misses X (notation B c Xc) meaning B
n X = $I
and these relationships will apply when B is replaced by every family {B;).
Finally, the structure of a Boolean algebra provides the general framework on
which we shall perform morphological treatments. Mathematical morphology is the
application of lattice theory to spatial structures.
283
0734-189X/86 $3.00
Copyright $’ 1986 by Academic Press, lnc
All rights of reproduction in any form resrrwd


剩余22页未读,继续阅读
资源评论

 tianya103192016-08-25写文章参考,资料不错
tianya103192016-08-25写文章参考,资料不错

jhjun65963296
- 粉丝: 0
- 资源: 1









最新资源
- 教学内容及补充-cha7.rar
- 设计1.ms14
- vscode-1.64.1.tar源码文件
- vscode-1.64.0.tar源码文件
- vscode-1.52.0.tar源码文件
- Music-Player +PlayerActivity+ rockplayer+ SeeJoPlayer 播放器JAVA源码
- vscode-1.46.0.tar源码文件
- 最近很火植物大战僵尸杂交版2.08苹果+安卓+PC+防闪退工具V2+修改工具+高清工具+通关存档整合包更新
- 超级好用的截图工具PixPin,可录制Gif图
- Screenshot_2024-05-21-17-06-42-64_2332cb9b27b851b548ba47a91682926c.jpg
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


