
© 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net
、
信
息
技术
、
如
何
用
语
言
编写
步
进
电机控
制
程
序
张
振
环
江苏
徐
州
中
国
矿
业
大学
自
动
化系
摘
要
本
文
叙
述
了用
语
言
编
写 控
制
多
台
步进电
机的
方
法
、
原
理
关
键
词
语言
工
控机 步
进
电机
概
述
语
言
是
近
年来
国
内
外得
到
迅速
推
广
使
用
的一种现
代
语
言
。
语言
具
有
功能
丰
富
、
表
达
能
力
强
、
使
用
灵活方
便
、
应
用面
广
、
目
标
程
序
效
率
高
、
可
移
植
胜
好
等特
点
,
它
既
有高
级
语言
的
优点
,
又
具有
低级
语
言
的
许
多特
点
,
因
此
,
使
用
语言
编写
步
进
电
机
控
制
程
序
比汇
编
语
言
方
便
得多
。
我们
在轧钢加
热
炉监
控系
统
中
利
用
语
言
,
在
一
开
关
量
输
人
输
出
接
口
板
上
实
现
了
对两
个
风阀
电
初 型
号
及
一
冲
以
因
阀电机
〔
型
号
的
控
制
,
使
得
一
板
除作
为
开
人
开
出板
外
又
作为
步进电
机
控制
板
,
既
简
化
了
整
付
落
吉构
又
阳
氏
了
成
本
造
价
,
达
到
了
较
理
想
的
控
制
效果
。
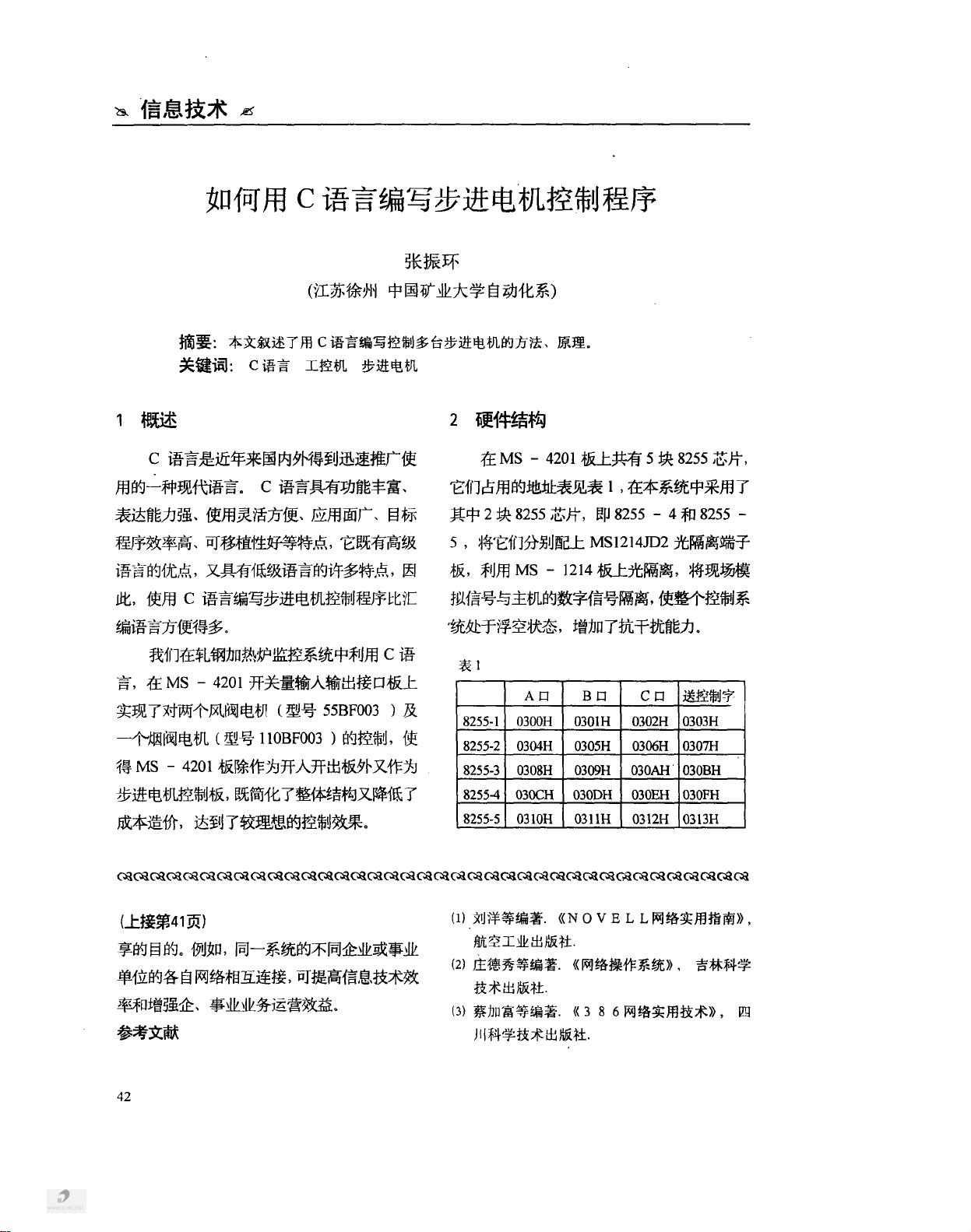
在
一
板上
共有
块
芯
片
,
它
们
占
用的地址
表
见
表
,
在本系统
中
采
用
了
其
中 块 芯片
,
即
一
和
,
将
它
们分
别
配
上
光
隔
离端
子
板
,
利
用
一
板
上
光
隔
离
,
将
现场
模
拟
信
号
与
主
机的
数字
信
号隔离
,
使
整
个
控
制
系
统
处于
浮
空状
态
,
增
加
了
抗干
扰能
力
表
口口 口口 口口
送控
制
字字
一
一
‘‘
仍
仪
二
仍
一
上
接
第
页
享
的
目
的
。
例如
,
同一
系
统
的
不同
企业
或
事
业
单位
的
各 自
网
络
相
互连接
,
可
提
高信
息
技
术效
率
和
增
强
企
、
事
业业
务
运
营
效益
参考
文
献
刘
洋
等
编
著
《
网
络实
用
指南
》
,
航
空工
业
出
版社
庄德
秀
等
编
著
《
网
络
操作系
统
》
,
吉
林
科
学
技
术
出
版社
蔡
加富
等
编
著
《
网
络实
用
技
术
》
,
四
川
科
学
技
术
出版
社













- 1
- 2
前往页