dsPIC30F 在无传感器BLDC 控制中的应用
需积分: 9 50 浏览量
2009-03-31
11:41:47
上传
评论
收藏 779KB PDF 举报

2004 Microchip Technology Inc. DS00901A_CN 第 1 页
AN901
引言
本应用笔记描述了一种完全可行且高度灵活的软件应
用,使用 dsPIC30F 来控制无传感器无刷直流
(brushless DC,BLDC)电机。 此软件将 dsPIC30F 外
设广泛应用于电机控制。所实现的无传感器控制算法特
别适用于风扇和泵。 程序使用 C 语言编写,经过特别优
化,并附有详细的注释以便于理解和程序修改。给定
软件特点
• 采用反电动势过零检测程序,无需使用位置传感元
件。
• 应用程序包含可调节参数和两种可选的起动方法以
适应特定负载。
• 可检测无传感器算法是否失效。
• 可重新起动无传感器控制而无需停止电机。
• 可控制放电电流以调节 DC 母线电压。
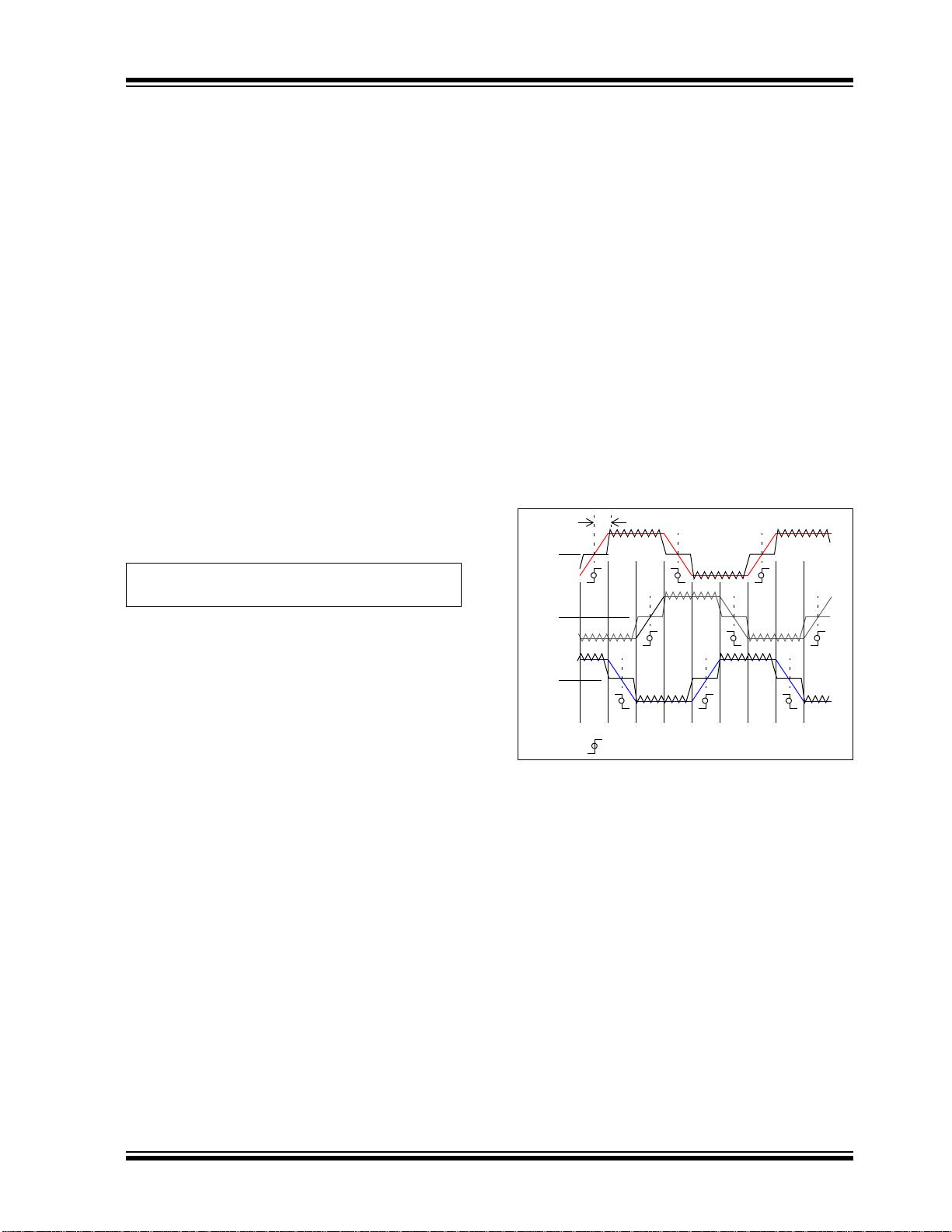
• 换相方案支持随速度增加而线性引入达 30°的相
位超前,进而获得更高的电机效率和更宽的速度范
围。
• 四种不同方式来控制电机速度。
• 简单的用户界面,带 LCD 显示,可通过按钮调节超
过 40 项参数。
• 软件大约占用 5 MIPS(最大),需要大约 16KB 的
程序存储空间。
• 不包含用户界面和调试代码时,应用代码可以装入
不到 12 KB 的程序存储器中,可与已设计的最小
存储器 dsPIC30F 器件 (dsPIC30F2010)兼容。
已知限制
• 使用时,无传感器系统能可靠工作的最大输出频率
大约为 150 Hz。 但是,这一限制可以让很常见的
4 极电机的最高运转速度达到 4500 RPM。
• 如果使用相位超前,输出频率最高可达 250 Hz (4
极电机可达 7500 RPM)。 通过修改软件,可达到
更高速度。
• 支持对角逆变器开关器件的硬调制。
• 系统支持在闭环换相模式下运行,通常风扇和泵都
需要这种支持。
背景知识
无刷直流 (BLDC)电机体积小、可控制且效率高,因
此在消费和工业应用中得以采用。这种电机还越来越多
地被应用于汽车应用中,以避免使用皮带和液压传动系
统,并提供更多功能和改善燃料利用率。 BLDC 电机控
制所需磁性元件和电子元器件成本的不断降低使得无刷
直流电机的应用越来越广泛,同时还被用于更高的功率
级别。
由于电励磁必须与转子位置同步,BLDC 电机运行时通
常带有一个或多个转子位置传感器。 由于成本、可靠性
以及机械装配等因素,尤其是当转子浸没在液体中运行
时,要求电机不带位置传感器运行 (即所谓的无传感
器运行)。
本文假设读者已经熟悉了带有位置传感器的 BLDC 的工
作原理,因此不再详细阐述该技术。 Microchip 应用笔
记 AN857 中对 BLDC 电机控制进行了非常有用的介绍。
在参考书目列出的书籍中可以找到其他相关内容。 需要
注意的是,本文讲述的无传感器方案是 AN857 所述的
更高级形式。 最后应该指出,本文中所有论述以及应用
软件均假定使用三相电机。
著者:
Charlie Elliott
Smart Power Solutions, LLP
合著者:
Steve Bowling
Microchip Technology Inc.
dsPIC30F 在无传感器 BLDC 控制中的应用



剩余35页未读,继续阅读
资源评论


ioaniu
- 粉丝: 0
- 资源: 1









最新资源
- 520马上到了两款动态爱心表白HTML代码(附源码)李峋同款爱心,快送给你爱的她或(他)吧12 情侣纪念日代码.zip
- 电子设计竞赛的单相不间断电源设计
- cutcamera1715961370938.png
- 基于MATLAB的图像处理课程设计报告.doc
- tensorflow-gpu-2.6.0-cp38-cp38-manylinux2010-x86-64.whl
- mmexport1715960553858.png
- tensorflow-gpu-2.6.0-cp37-cp37m-manylinux2010-x86-64.whl
- 通过 .NET 应用程序中的源代码查找 SQL 注入
- 电子设计竞赛2007年B题 无线识别装置.doc
- Wox全局搜索工具,一款win下的全局搜索软件
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


