
Fully Convolutional Networks for Semantic Segmentation
Jonathan Long
∗
Evan Shelhamer
∗
Trevor Darrell
UC Berkeley
{jonlong,shelhamer,trevor}@cs.berkeley.edu
Abstract
Convolutional networks are powerful visual models that
yield hierarchies of features. We show that convolu-
tional networks by themselves, trained end-to-end, pixels-
to-pixels, exceed the state-of-the-art in semantic segmen-
tation. Our key insight is to build “fully convolutional”
networks that take input of arbitrary size and produce
correspondingly-sized output with efficient inference and
learning. We define and detail the space of fully convolu-
tional networks, explain their application to spatially dense
prediction tasks, and draw connections to prior models. We
adapt contemporary classification networks (AlexNet [22],
the VGG net [34], and GoogLeNet [35]) into fully convolu-
tional networks and transfer their learned representations
by fine-tuning [5] to the segmentation task. We then define a
skip architecture that combines semantic information from
a deep, coarse layer with appearance information from a
shallow, fine layer to produce accurate and detailed seg-
mentations. Our fully convolutional network achieves state-
of-the-art segmentation of PASCAL VOC (20% relative im-
provement to 62.2% mean IU on 2012), NYUDv2, and SIFT
Flow, while inference takes less than one fifth of a second
for a typical image.
1. Introduction
Convolutional networks are driving advances in recog-
nition. Convnets are not only improving for whole-image
classification [22, 34, 35], but also making progress on lo-
cal tasks with structured output. These include advances
in bounding box object detection [32, 12, 19], part and key-
point prediction [42, 26], and local correspondence [26, 10].
The natural next step in the progression from coarse to
fine inference is to make a prediction at every pixel. Prior
approaches have used convnets for semantic segmentation
[30, 3, 9, 31, 17, 15, 11], in which each pixel is labeled with
the class of its enclosing object or region, but with short-
comings that this work addresses.
∗
Authors contributed equally
96
384
256
4096
4096
21
21
backward/learning
forward/inference
pixelwise prediction
segmentation g.t.
256
384
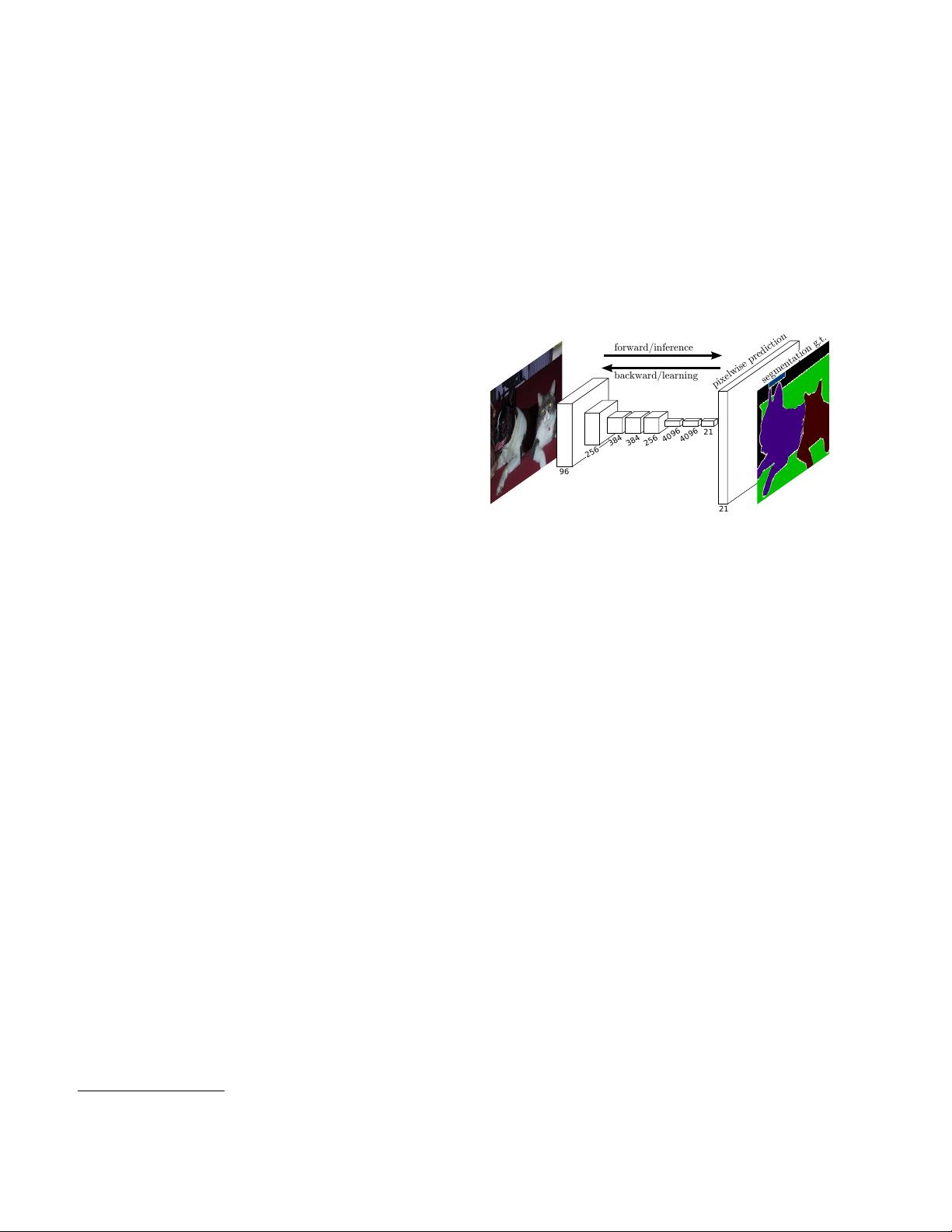
Figure 1. Fully convolutional networks can efficiently learn to
make dense predictions for per-pixel tasks like semantic segmen-
tation.
We show that a fully convolutional network (FCN)
trained end-to-end, pixels-to-pixels on semantic segmen-
tation exceeds the state-of-the-art without further machin-
ery. To our knowledge, this is the first work to train FCNs
end-to-end (1) for pixelwise prediction and (2) from super-
vised pre-training. Fully convolutional versions of existing
networks predict dense outputs from arbitrary-sized inputs.
Both learning and inference are performed whole-image-at-
a-time by dense feedforward computation and backpropa-
gation. In-network upsampling layers enable pixelwise pre-
diction and learning in nets with subsampled pooling.
This method is efficient, both asymptotically and abso-
lutely, and precludes the need for the complications in other
works. Patchwise training is common [30, 3, 9, 31, 11], but
lacks the efficiency of fully convolutional training. Our ap-
proach does not make use of pre- and post-processing com-
plications, including superpixels [9, 17], proposals [17, 15],
or post-hoc refinement by random fields or local classifiers
[9, 17]. Our model transfers recent success in classifica-
tion [22, 34, 35] to dense prediction by reinterpreting clas-
sification nets as fully convolutional and fine-tuning from
their learned representations. In contrast, previous works
have applied small convnets without supervised pre-training
[9, 31, 30].
Semantic segmentation faces an inherent tension be-
tween semantics and location: global information resolves
what while local information resolves where. Deep feature
hierarchies encode location and semantics in a nonlinear
1

剩余9页未读,继续阅读
资源评论

 WQL2572022-01-11哪里翻译了,全是英文
WQL2572022-01-11哪里翻译了,全是英文

Lucian_s
- 粉丝: 2
- 资源: 3









最新资源
- 机械设计带定位针的机械拉料装置sw18可编辑全套技术资料100%好用.zip
- 二手车销售数据集CSV格式文件
- Web前端期末题库和答案【vue、JavaScript、Node.、html等等】选择题问答题198个,分试题版和答案版(详细解析)-2025
- 机械设计磁环焊接机sw21可编辑全套技术资料100%好用.zip
- 机械设计单叉固定机sw12可编辑全套技术资料100%好用.zip
- 通信原理 systemview 16QAM调制与解调系统的仿真 16QAM调制解调系统与解调系统的仿真 用SystemView建立一个16QAM调制解调器电路,分析理解系统的各个模块功能,观察波形图
- 机械设计带举升功能的滚筒AGV小车sw20全套技术资料100%好用.zip
- 心电信号ECG去噪,Matlab程序,使用低通滤波和小波分解结合 先去除高于80Hz的高频噪声,再去除高于50Hz的噪声和工频干扰等,最后去除基线漂移 具体工作如下: 1、读取一段ECG信号,采样
- C# winform 超市收营系统(源码+sql文件)-2025
- R语言数据分析+文本分析+以发布的报告为例
- 机械设计单试管上料检测装置sw22可编辑全套技术资料100%好用.zip
- 机械设计氮气弹簧压力测试机sw18可编辑全套技术资料100%好用.zip
- 基于R语言的“十四五”农牧业优势报告文本分析与可视化
- Python 实现堆排序的源码及实例
- 2025淘宝天猫大额内部隐藏优惠券怎么领取享受券后价优惠购物省钱攻略
- Python高级运维编程实战精品入门进阶.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


