双目视觉测量是一种基于计算机视觉技术的三维空间定位方法,它通过两台相机捕捉同一场景的图像,利用视差原理来恢复物体的三维信息。在本讲义“双目视觉测量原理与算法”中,主要探讨了如何通过几何解算方法来实现这一目标。
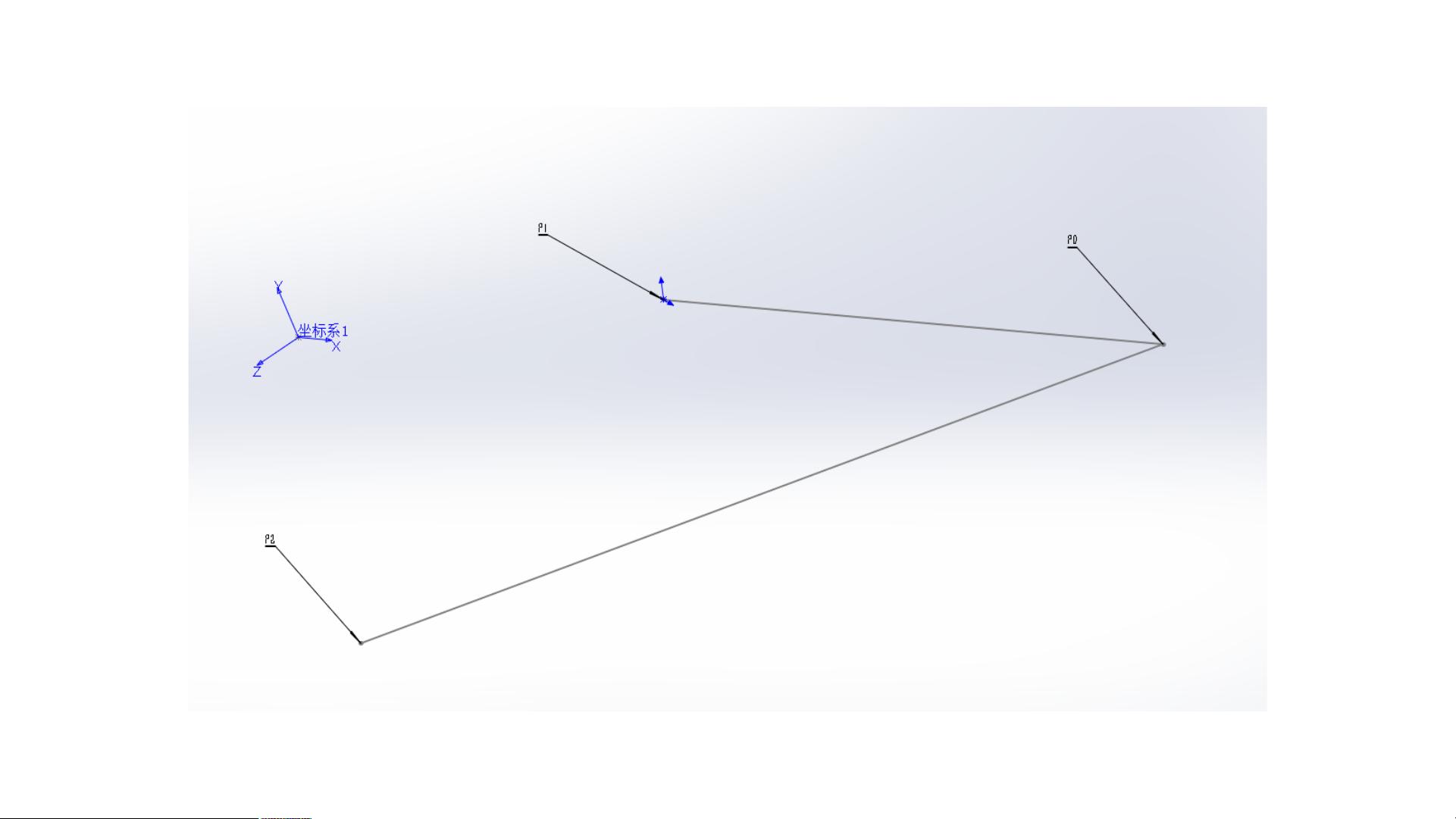
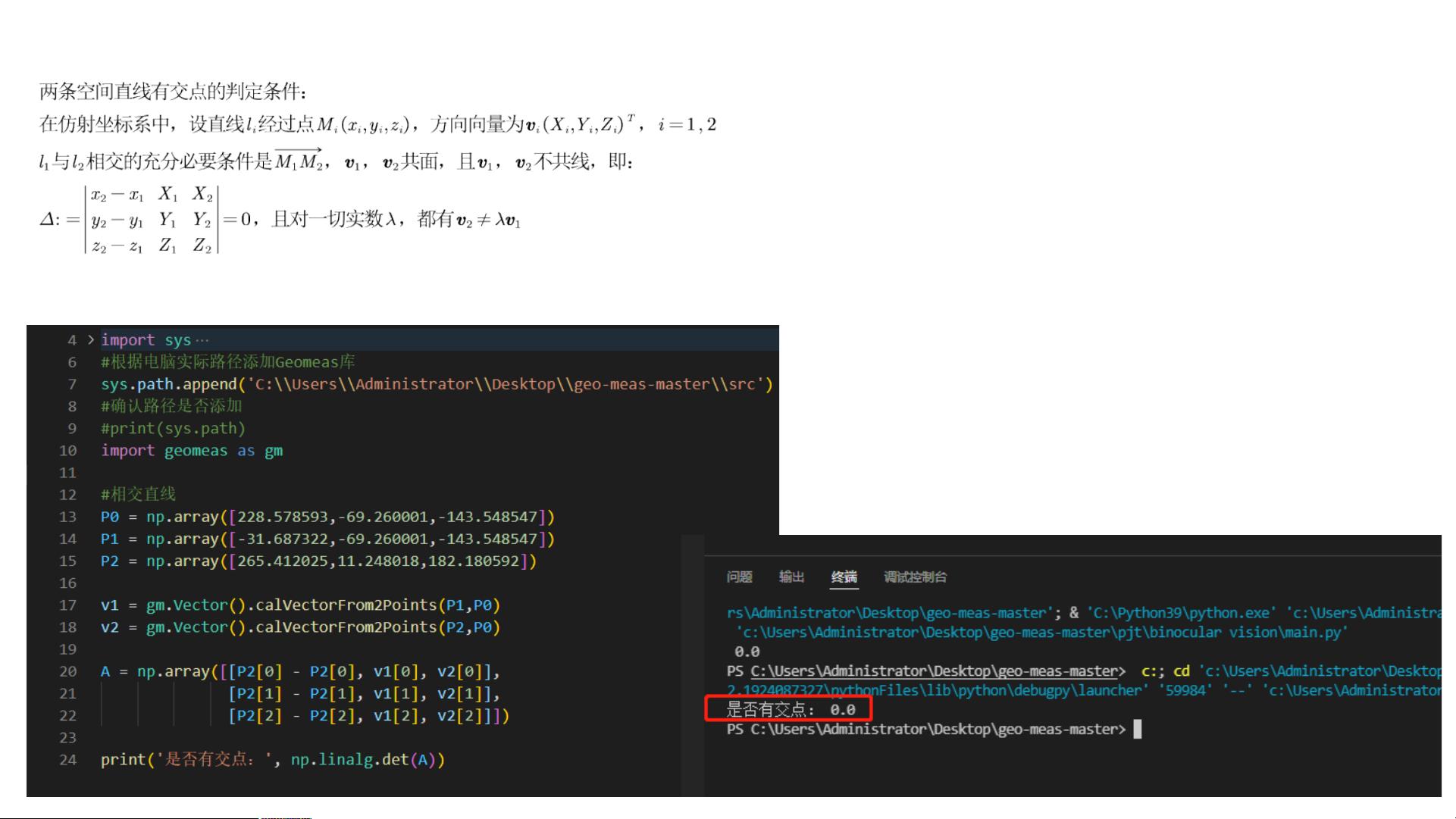
我们关注的是直线的交点问题。在解析几何中,两条直线的交点可以通过联立方程组来求解。例如,直线1(P0P1)和直线2(P2P3)的交点P可以表示为这两条直线方程的解。在理想情况下,如果两条直线确实相交,它们的交点坐标可以通过简单的数学运算得出。然而,在实际应用中,由于测量误差、噪声和相机成像的非理想性,这种理想状态很难达到。
当两条直线在空间中不相交时,我们面临一个无解的数学问题。在这种情况下,寻找一个最佳解变得至关重要。最小二乘法是一个常用的优化工具,它能够找到一个使所有数据点到该点距离平方和最小的点,即“最佳位置点”。在这个问题中,即使两条直线不相交,我们也可以通过最小二乘算法找到一个近似的交点,即公垂线的中点。公垂线是两条不平行直线之间的垂直线段,它的中点理论上可能接近于最佳解,但并不一定是精确的交点。
在实际计算中,我们将计算的点代入到线性方程组AX - B中,通过判断残差(即AX - B的值)来评估解的优劣。如果残差较小,说明计算的点与线性方程组的解匹配度较高,解的质量较好。在本案例中,发现使用最小二乘法计算的点导致的最大残差不超过1.6mm,表明这种方法的精度相对较高。
另一方面,我们还对比了公垂线中点作为解的精度。当将公垂线中点带入模型计算残差时,发现最大残差达到了8.59mm,这远高于最小二乘法计算的结果,说明公垂线中点并不是最佳解。这意味着在处理两条不相交直线的交点问题时,最小二乘法提供了一个更优的解决方案。
我们还讨论了不相交直线的公垂线之间的距离问题。公垂线MN和OP之间的距离可以作为衡量两条直线接近程度的一个指标。在实际应用中,理解和计算这个距离有助于我们更好地理解和优化双目视觉测量的精度。
双目视觉测量的核心在于通过几何和代数方法解决空间中的位置关系问题。在处理不相交直线的交点时,最小二乘法提供了一种有效的求解策略,能够适应实际环境中的误差,提高测量的精度和鲁棒性。在进行双目视觉系统设计和优化时,对这些算法的理解和运用是至关重要的。



 弯道超越2024-06-24资源使用价值高,内容详实,给了我很多新想法,感谢大佬分享~
弯道超越2024-06-24资源使用价值高,内容详实,给了我很多新想法,感谢大佬分享~ 九点三十七2024-09-22这个资源总结的也太全面了吧,内容详实,对我帮助很大。
九点三十七2024-09-22这个资源总结的也太全面了吧,内容详实,对我帮助很大。












