基于TMS320LF2407A的PMSM矢量控制电流环的设计心得三相永磁.pdf
版权申诉
74 浏览量
2023-08-19
22:51:05
上传
评论
收藏 439KB PDF 举报

基于 TMS320LF2407A 的 PMSM 矢量控制电流环的设计心得
三相永磁同步电动机的转矩方程为
(4-1)
上式说明了转矩由两项组成,括号中的第一项是由三相旋转磁场和永磁磁场相互作用所
产生的电磁转矩;第二项是由凸极效应引起的磁阻转矩。
对于嵌入式转子,Ld<Lq,电磁转矩和磁阻转矩同时存在。可以灵活有效地利用磁阻转
矩,通过调整和控制β 角,用最小的电流幅值来获得最大的输出转矩。对于凸极转子,Ld=Lq
因此只存在电磁转矩,而不存在磁阻转矩,转矩方程变为
(4-2)
由式中可以看出,当三相合成的电流矢量 is 与 d 轴的夹角β 等于 90°时可以获得最大
转矩,也就是说 is 与 q 轴重合时转矩最大。这时, 式
4-2 可以改写为
因为是永磁转子ψ
f
是一个不变的值,所以式 4-2 说明了只要保持 is 与 d 轴垂直,就可
以像直流电动机控制那样,通过调整直流量 iq 来控制转矩,从而实现三相永磁同步伺服电
动机的控制参数的解耦,实现三相永磁同步伺服电动机转矩的线性化控制。
下面分别根据交、直流跟踪控制法的系统结构图,介绍 PMSM 矢量控制的具体工作过
程:
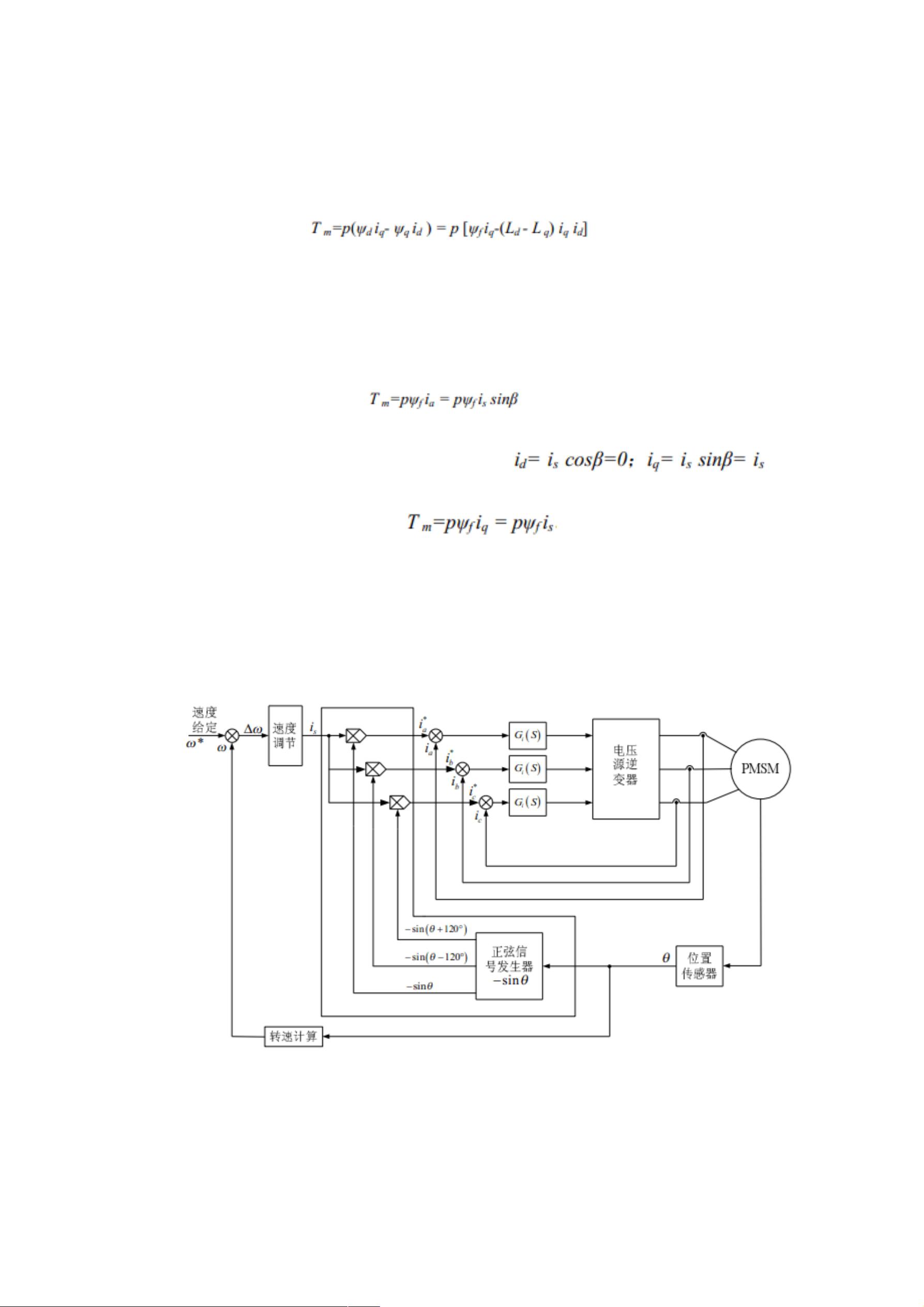
⑴. 交流跟踪控制法
图 1 交流跟踪控制法(DC 法)系统结构图
永磁同步电机矢量控制交流跟踪控制法(AC 法)系统结构图如图 1 示系统同样采用速度
和电流闭环控制,速度环为外环,电流环为内环。由速度环的速度调节器输出综合电流大小
的给定 is(这里 is 的相位与 q 轴相同)由于电磁转矩 Te 正比于 is,is 也相当于转矩给定。
资源评论













