
基于 ProE 的 2K-H 行星减速器的参数化设计和仿真动画
——从齿轮的建立开始
第一部分:零件设计部分
(一)齿数的确定
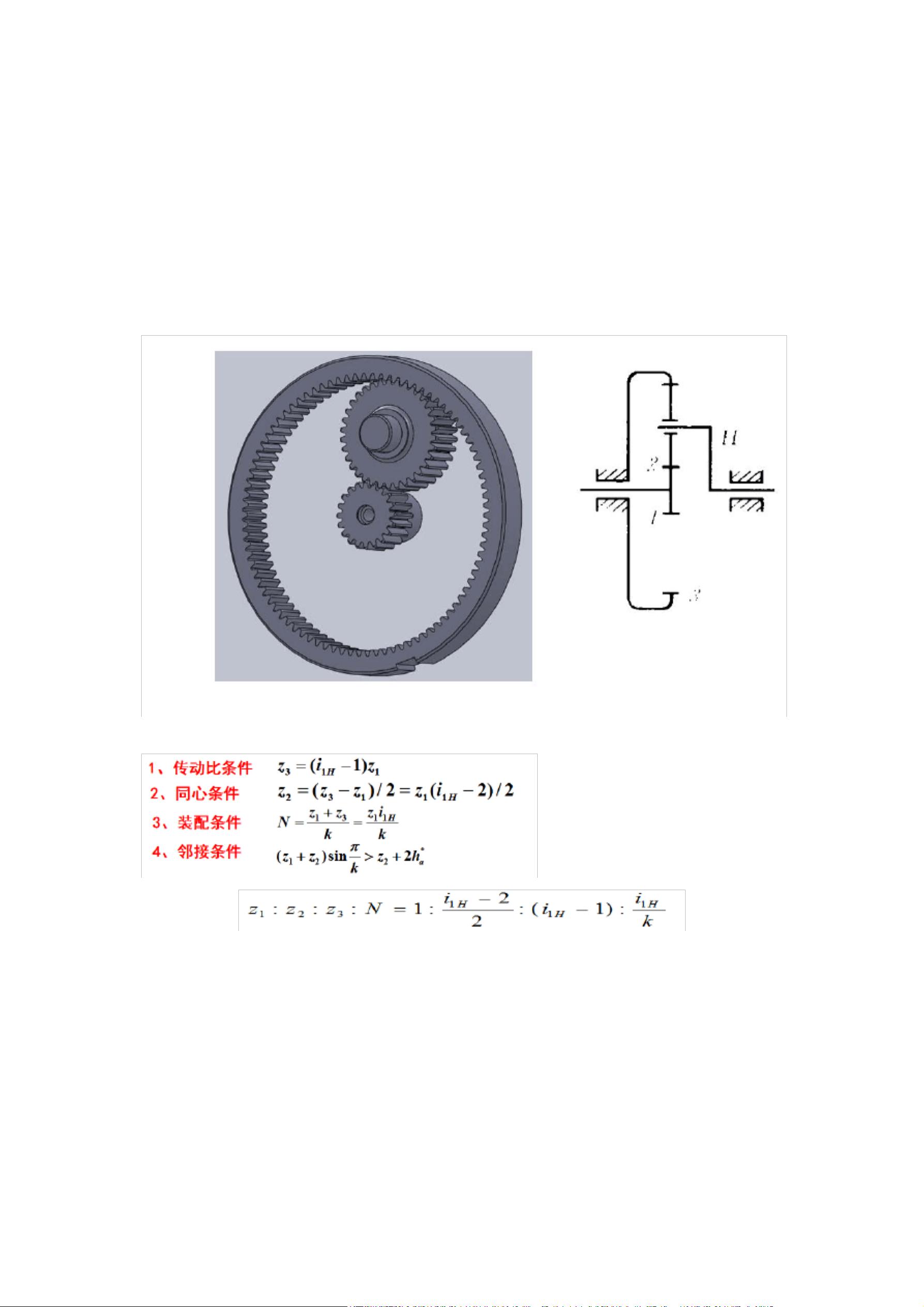
2K-H 型行星减速器的要求如下:2K—H 型行星减速器,要求的减速比为 5.33,设行星轮数
k=4,并采用标准齿轮传动,试确定各轮的齿数。假定模数m=2.5,齿宽 b=50mm。
首先需要解决的是齿数的问题,各轮的齿数应该满足下条件:
由配齿公式:
可以计算得知:Z1 : Z2 : Z3 : N = 3 : 5 : 13 : 2.5
取 Z1=30 得 Z2=50 ; Z3=130 (为避免根切,在的取值要大于等于 17,节省材料的话选择
最小满足条件齿数,这里为了是模型看起来更大,选择了z1=30)
验算邻接条件:(Z1+Z2)sin(π/k)=56.6 > 50+2 = Z2+2*hax 满足条件。
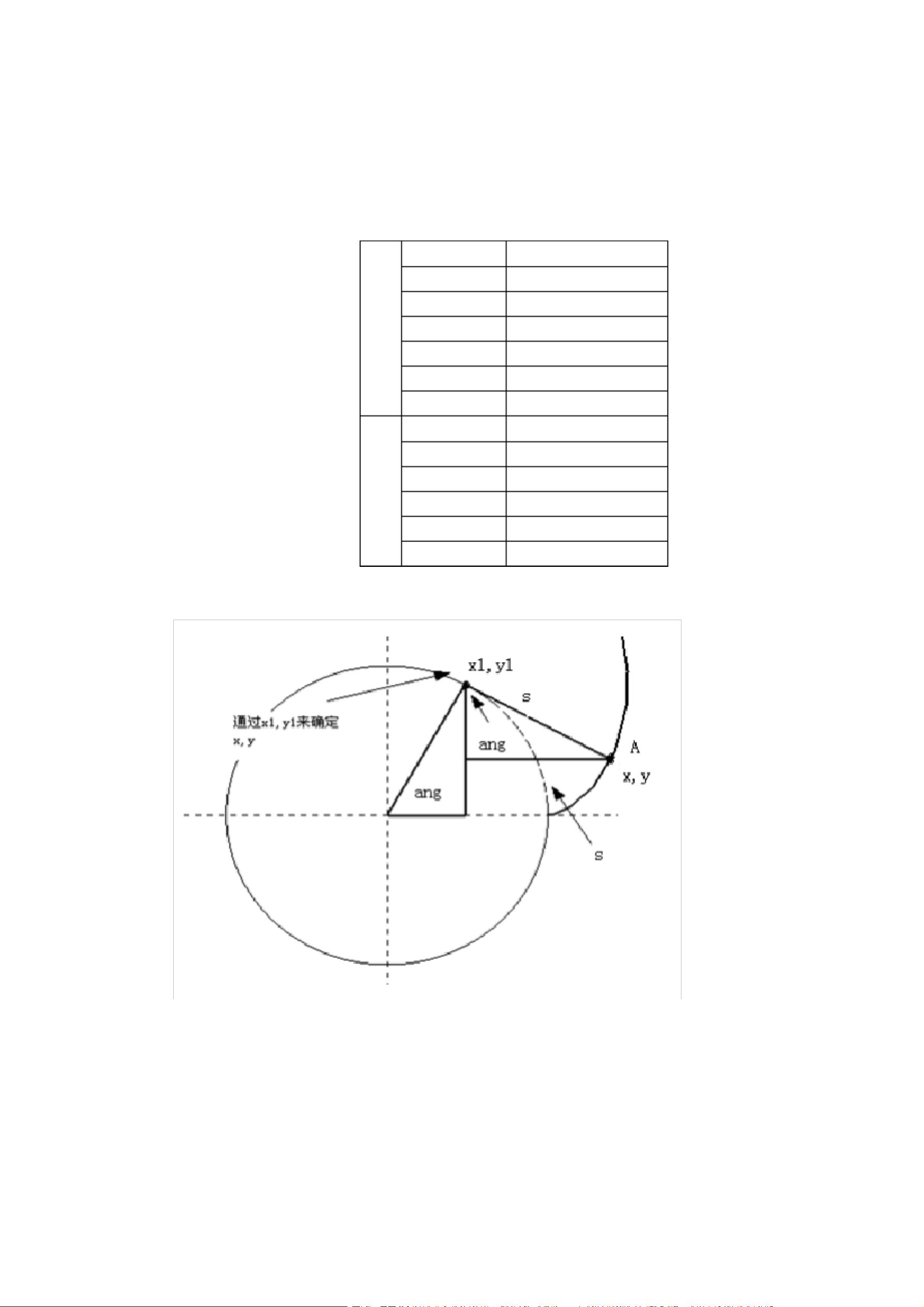
对 N 做一个说明:若在 A 位置能装入第 2 个行星轮,须使齿轮 1 转过 N 个完整的齿,即 j
1
恰好为中心轮 1 个齿距 P 所对应圆心角的整数倍。
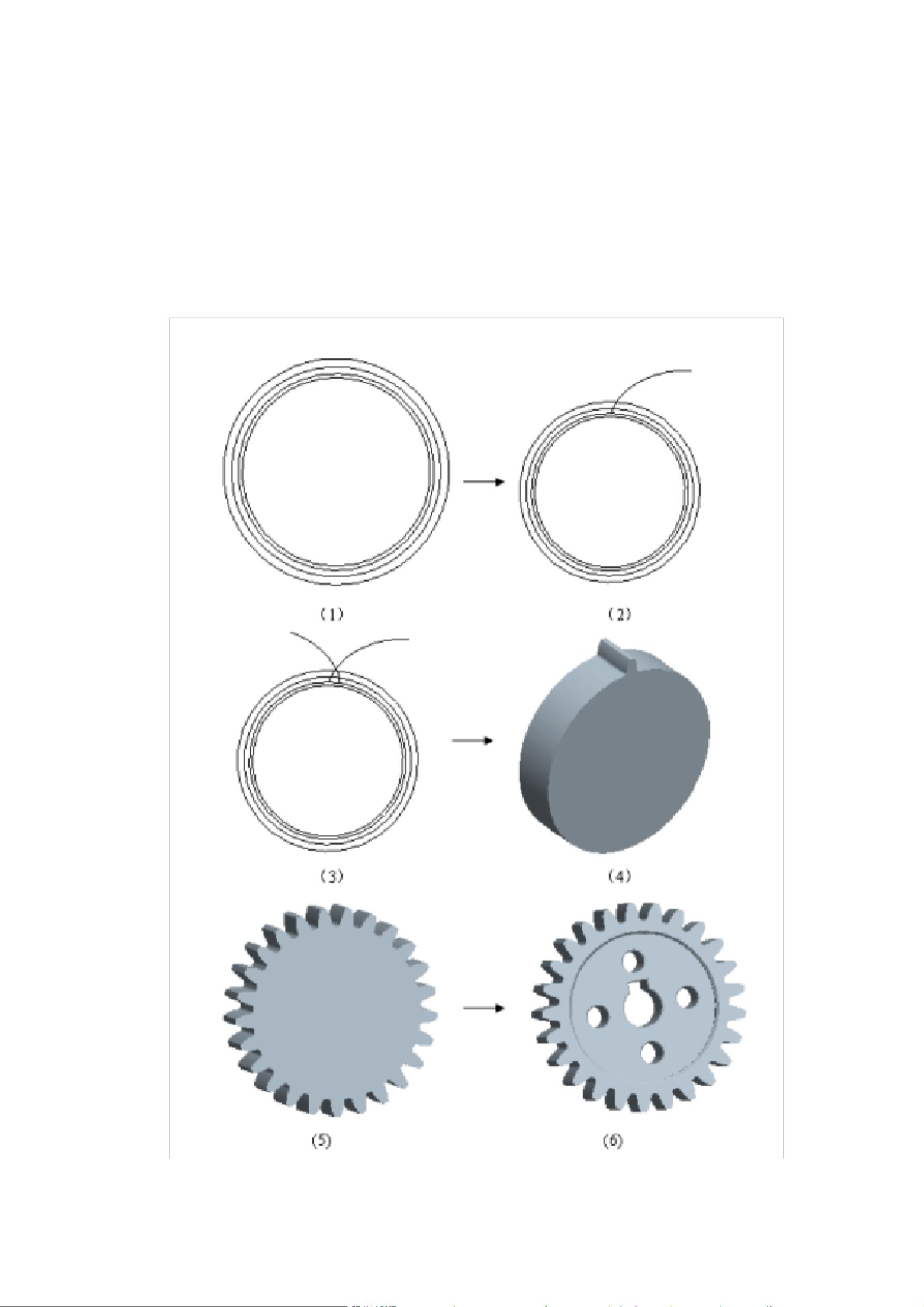
(二)齿轮的参数化建模
齿轮的参数建模,关键问题有以下几点:
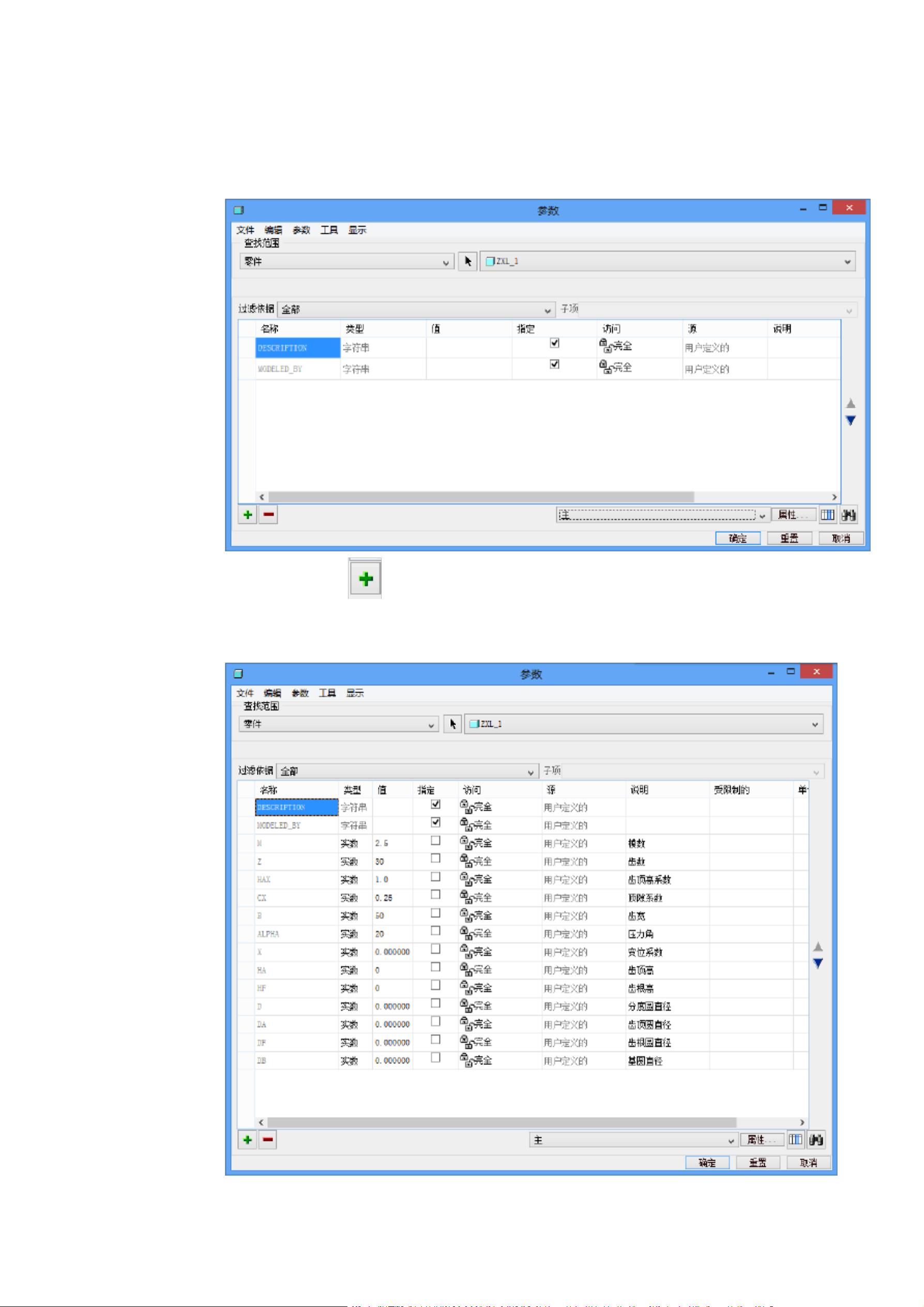
1、弄清楚齿轮设计的关键参数。齿轮的参数有哪些呢,查看课本会看到这些:模数m,齿
数 z,齿顶圆直径 da,齿根圆直径 df,基圆直径 db,分度圆直径 d,齿距 p,齿厚 s,
剩余24页未读,继续阅读
资源评论


hhappy0123456789
- 粉丝: 74
- 资源: 5万+









最新资源
- 丹佛丝 GSDML-V2.31-Danfoss-FC-20170207.zip
- HR-saas中台管理项目.zip
- Unity游戏开发入门指南.pdf
- C++期末大作业基于C++和QT的天气预报系统源码(高分项目)
- C#ASP.NET资产评估管理系统源码数据库 SQL2008源码类型 WinForm
- python实现基于Django+MySQL的天气预报系统源码(高分项目)
- 恶搞源程序,小小的整蛊一下朋友吧
- 基于 Vue 3、Vite、Ant Design Vue 4.0、TypeScript、Vben Vue Admin,最先进的技术栈,让初学者能够更快的入门并投入到团队开发中去
- Python毕业设计-豆瓣电影短评数据挖掘与情感分析项目源码(高分项目)
- Vue3 + Vite5 + TypeScript + Element-Plus 构建的后台管理前端模板,配套接口文档和后端源码,vue-element-admin 的 Vue3 版本
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


