
.
基于 Matlab 的卡尔曼滤波算法仿真
1. 卡尔曼滤波器原理
卡尔曼滤波是解决以均方误差最小为准则的最佳线性滤波问题,它根据前一个估计
值和最近一个观察数据来估计信号的当前值。它是用状态方程和递推方法进行估计的,
而它的解是以估计值(常常是状态变量的估计值)的形式给出其信号模型是从状态方
程和量测方程得到的。
卡尔曼滤波号和噪声是用状态方程和测量方程来表示的。因此设计卡尔曼滤波器要
求已知状态方程和测量方程。它不需要知道全部过去的数据,采用递推的方法计算,
它既可以用于平稳和不平稳的随机过程,同时也可以应用解决非时变和时变系统,因
而它比维纳过滤有更广泛的应用。
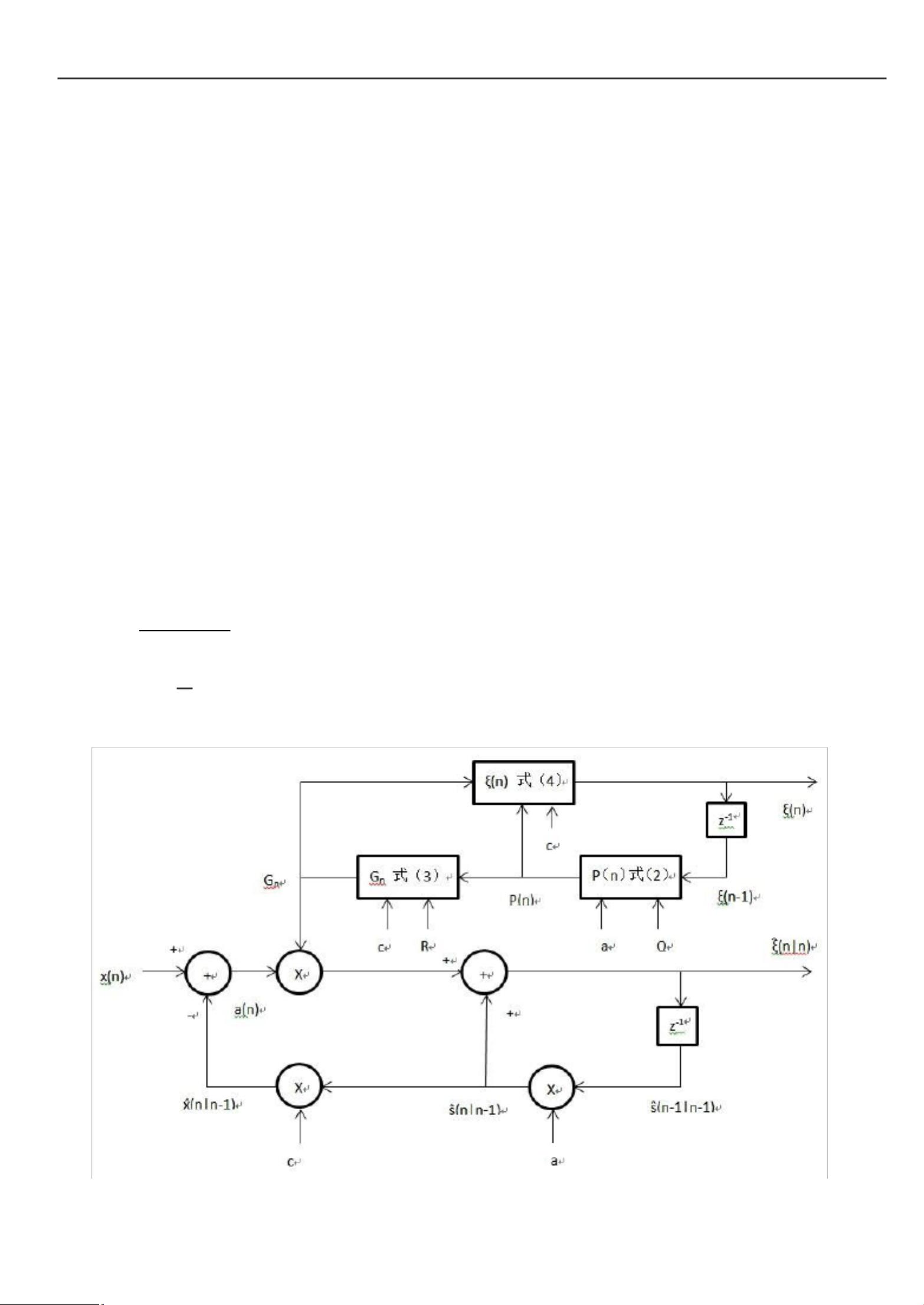
卡尔曼几个重要公式:
s(n|n) = a s (n-1|n-1) + G
n
[x(n) – ac s (n-1|n-1)]
(1)
P(n) = a
2
ξ(n-1) + Q (2)
G
n
=
(
)
2
+
(
)
(3)
ξ(n) =
= (1 – cG
n
)P(n) (4)
这组方程的递推计算过程如图 1 所示。
图 1. 卡尔曼滤波器递推运算流程图
. .
资源评论


hhappy0123456789
- 粉丝: 77
- 资源: 5万+









最新资源
- 基于51单片机的智能工厂火灾检测预警系统详细文档+全部资料.zip
- 基于keras的银行卡号识别全部资料+详细文档+高分项目.zip
- 基于Kersa实现的声纹识别模型全部资料+详细文档+高分项目.zip
- 基于触摸屏控制的多功能电子钟,STM32407实现嵌入式系统详细文档+全部资料.zip
- 基于嵌入式AI技术的课堂考勤系统开发详细文档+全部资料.zip
- 基于laravel5.5开发的图片识别平台管理系统源码全部资料+详细文档+高分项目.zip
- 基于kinect 的人体 动作识别全部资料+详细文档+高分项目.zip
- 基于MATLAB的车牌识别系统全部资料+详细文档+高分项目.zip
- 基于MFCC语音特征提取和识别全部资料+详细文档+高分项目.zip
- 基于machine learning识别验证码全部资料+详细文档+高分项目.zip
- 基于MFC开发的指纹识别.全部资料+详细文档+高分项目.zip
- 基于OpenCV的视频人脸识别全部资料+详细文档+高分项目.zip
- 基于PCA和SVM的人脸识别全部资料+详细文档+高分项目.zip
- 基于Pytorch的OCR工具库,支持常用的文字检测和识别算法全部资料+详细文档+高分项目.zip
- 机械设计桁架机器人自动上下料CNC车间sw18可编辑全套设计资料100%好用.zip
- 基于python图像识别实现的连连看外挂,可实现QQ连连看秒破全部资料+详细文档+高分项目.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


