•
Generative models take training samples from some data
distribution and learn a model that represents that distribution.
•
Density estimation:
•
Sample generation:
Generative modeling
(Goodfellow 2016)
Generative Modeling
•
Density estimation
•
Sample generation
Training examples Model samples
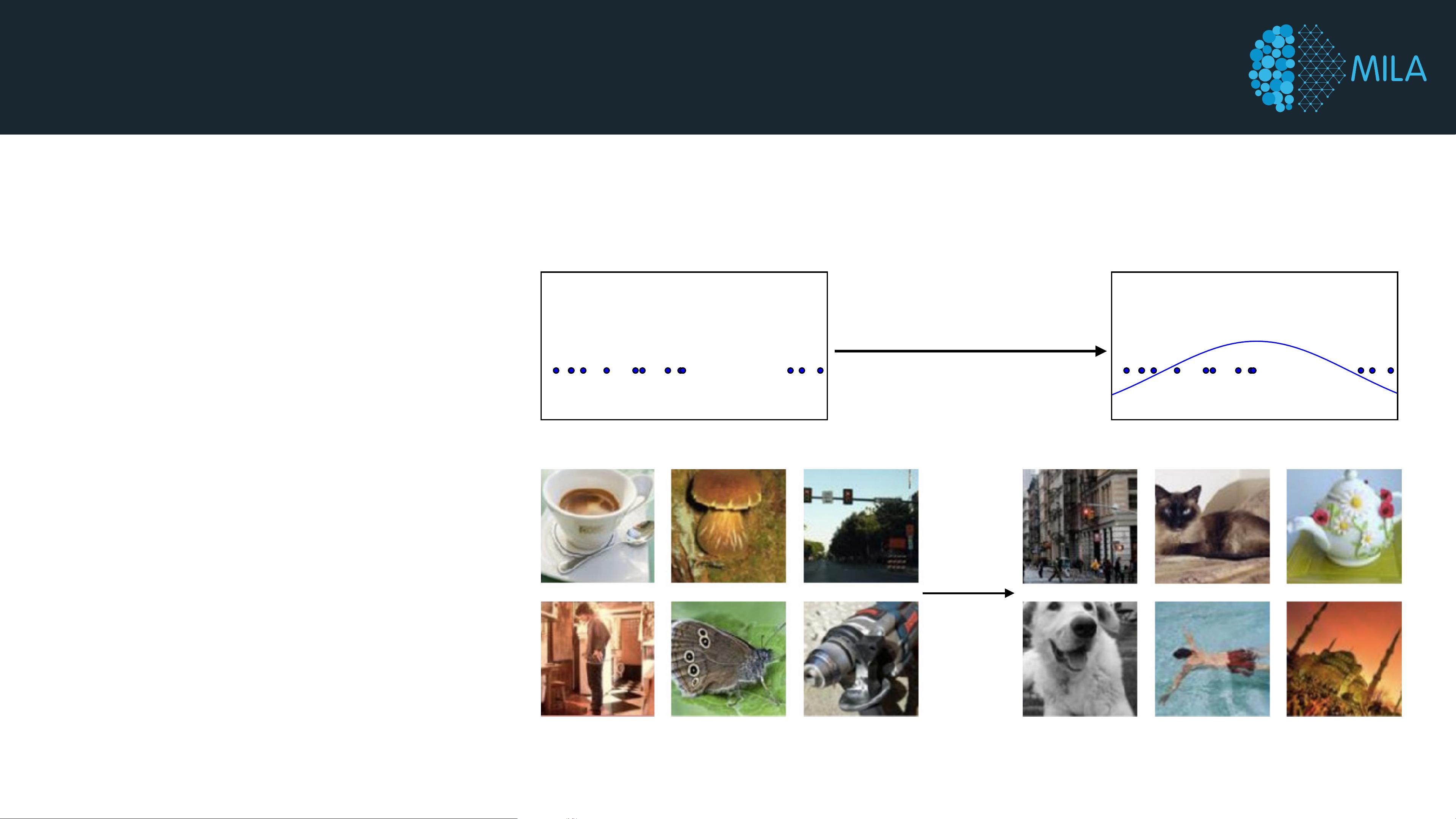
Figure 1: Some generative models perform density estimation. These models take a
training set of examples d rawn from an un k n own dat a -g en e rat i n g distribut io n p
data
and return an estimate of that distribution. The estimate p
model
can be evaluated for
a particular va lu e o f x to obtain an estimate p
model
(x) of the true density p
model
(x).
This figure illustrates the process for a collecti o n of sample s of one-di men s io n a l dat a
and a Gaussian model.
(Goodfellow 2016)
Generative Modeling
•
Density estimation
•
Sample generation
Training examples Model samples
Figure 2: Some generative models are able to generate samples from the model distri-
bution. In t h is illustratio n of the p rocess, we show samples fro m the ImageNet (Deng
et al.,2009,2010;Russakovskyet al., 2014) dataset. An id e al generative model would
be able to train on examples as shown o n the left and then create more examples from
the same distribution as shown on the right. At present, generat ive mod el s are not yet
advanced enough to do this correctly for ImageNet, so for demo n st ra t io n purpo ses this
figure uses actual I m a g eNe t data to illustrate wh a t an ideal generative mode l would
produce.
http://www.iangoodfellow.com/slides/2016-12-04-NIPS.key
The video was recorded by the NIPS f oun dat i on and should be made avail -
able at a later date .
Generative adversarial networks are an exampl e of generative models.The
term “generative model” is used in many di↵erent way s. In this tutorial, the
term refers to any model that takes a tr ai ni n g set, consisting of samples drawn
from a distribution p
data
, and learns to represent an estimate of that distri bu t i on
somehow. The result is a probabil i ty d i st r ib u ti on p
model
. In some cases, the
model estimates p
model
explicitly, as shown in figure 1. In other cases, the
model is onl y able to generate samples from p
model
, as shown in fi gur e 2. Some
models are able to do both. GANs focus primarily on sample generation, th ou gh
it is poss i ble to design GANs that can do both.
2
images taken from Goodfellow (2017)
(Goodfellow 2016)
Generative Modeling
•
Density estimation
•
Sample generation
Training examples Model samples
Figure 1: Some gen era t i ve mod el s perform density estimation . These models take a
training set of examples drawn from an unknown data-g e n era ti n g distributio n p
data
and return an est imat e of that distribution. The estimate p
model
can be evaluated for
a particular value of x to obtain an estimate p
model
(x) of the true density p
model
(x).
This figure illustrates the process for a collecti on of samples of one-dimension al data
and a Gaussian model.
(Goodfellow 2016)
Generative Modeling
•
Density estimation
•
Sample generation
Training examples Model samples
Figure 2: Some generative mod els are able to generate samples from the model distri-
bution. In this illustration of the process, we show samples from the Ima g eN et (Deng
et al.,2009,2010;Russakovskyet al., 2014) dat as et . An id ea l generative model would
be able to train on exampl es as shown on the left a n d then cre a te more exampl es from
the same d is t rib u t io n as shown on th e right. At present , generative models are not yet
advance d enough to do this correctly for ImageNet, so for demon st ra t io n purposes this
figure uses actual ImageNet data to illu st ra t e what an ide al generative model would
produce.
http://www.iangoodfellow.com/slides/2016-12-04-NIPS.key
The video was r ec ord ed by the NIPS foundati on an d should be m ade avail -
able at a later date.
Generative adversarial networ k s ar e an example of generative models.The
term “generative model” is used in many di↵erent ways. In this tutorial, t h e
term r ef er s to any model that t akes a training set, consisting of samples drawn
from a distribution p
data
, and learns to represent an estimate of that distribution
somehow. The result is a probabili ty distri b ut i on p
model
. In some cases, the
model est i mat es p
model
explicitly, as shown in figure 1. In other cases, the
model is only able to generate sampl e s fr om p
model
, as shown in figure 2. Some
models are able to do both. GANs focus primarily on sample generat ion , though
it is possible to desi gn GANs th at can do both.
2
2








评论0
最新资源