
网眼 (驱动 ) 安装及测试 详解
(注意:使用相同的编译器编译内核及应用程序)
源文件包下载
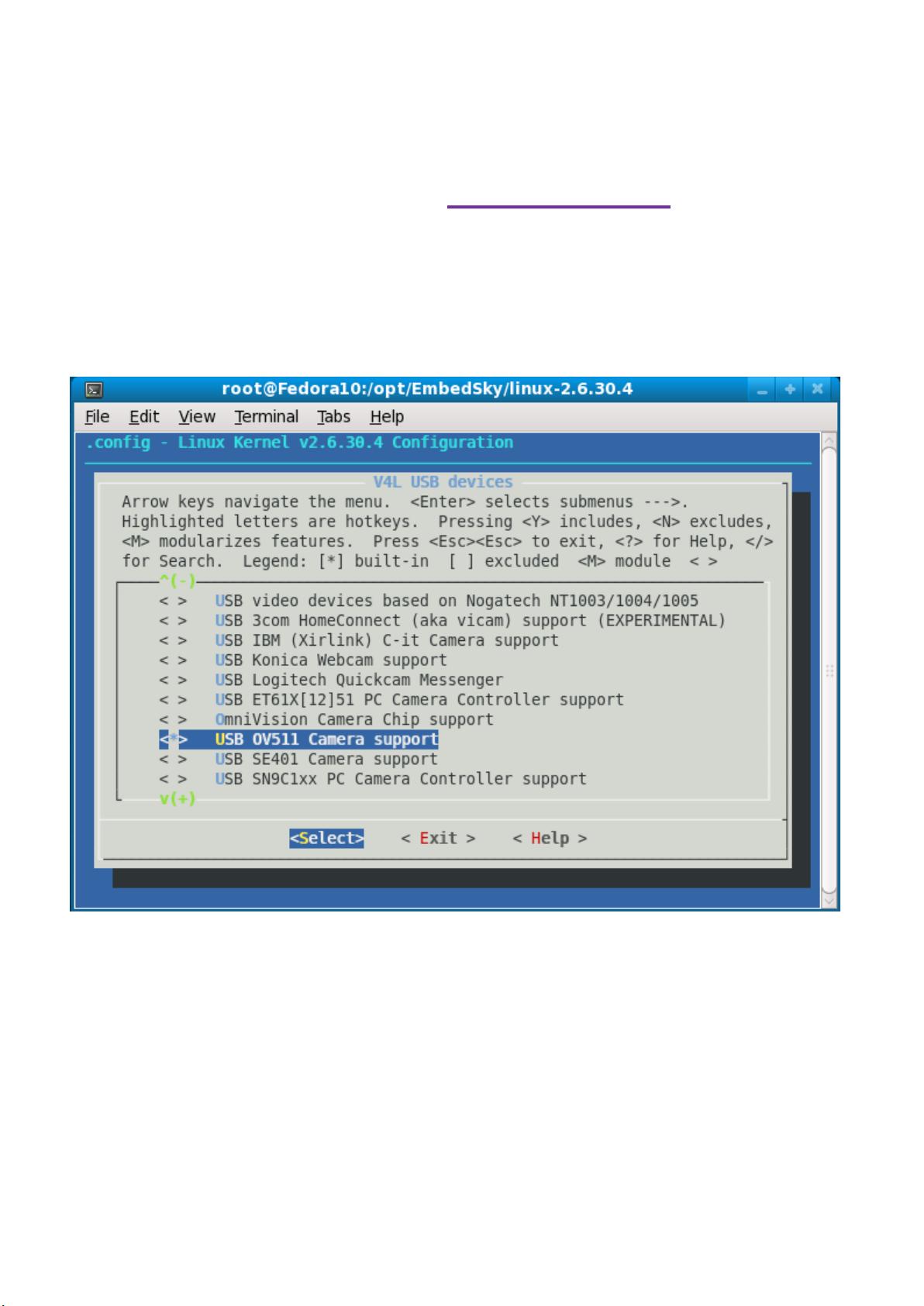
、安装驱动
!!""#$""#%&'()*+,-./01!)/2)3.4)!5;&'(
+""#67+-89:""#;'#89:+3

剩余14页未读,继续阅读
资源评论


guoyin
- 粉丝: 22
- 资源: 25









最新资源
- 毕设和企业适用springboot社交互动平台类及健康数据分析系统源码+论文+视频.zip
- 毕设和企业适用springboot社交互动平台类及共享经济平台源码+论文+视频.zip
- 毕设和企业适用springboot人才招聘类及大数据实时处理系统源码+论文+视频.zip
- 毕设和企业适用springboot人才招聘类及城市智能管理系统源码+论文+视频.zip
- 毕设和企业适用springboot人才招聘类及城市智能运营平台源码+论文+视频.zip
- 毕设和企业适用springboot人力资源管理类及企业IT解决方案平台源码+论文+视频.zip
- 毕设和企业适用springboot人力资源管理类及企业供应链平台源码+论文+视频.zip
- 毕设和企业适用springboot人力资源管理类及健康数据分析系统源码+论文+视频.zip
- 毕设和企业适用springboot社交互动平台类及交通信息平台源码+论文+视频.zip
- 毕设和企业适用springboot社交互动平台类及金融交易平台源码+论文+视频.zip
- 毕设和企业适用springboot社交互动平台类及健身管理平台源码+论文+视频.zip
- 毕设和企业适用springboot人才招聘类及健康管理平台源码+论文+视频.zip
- 毕设和企业适用springboot人力资源管理类及企业数字资产管理平台源码+论文+视频.zip
- 毕设和企业适用springboot人力资源管理类及视觉识别平台源码+论文+视频.zip
- 毕设和企业适用springboot人力资源管理类及企业云管理平台源码+论文+视频.zip
- 毕设和企业适用springboot社交互动平台类及客户服务平台源码+论文+视频.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


