
F-15 S/MTD IFPC FAULT TOLERANT DESIGN
Frederick
L.
Tuttle Robert
L.
Kisslinger
Dion
F.
Ritzema
Section Chief
-
Electronics
Branch Chief
-
Technology Lead Engineer
-
Electronics
McDonnell Aircraft Company McDonnell Aircraft Company McDonnell Aircraft Company
McDonnell Douglas Corporation McDonnell Douglas Corporation McDonnell Douglas Corporation
St. Louis, Missouri 63166 St. Louis, Missouri 63166 St. Louis, Missouri 63166
ABSTRACT
One
of
the major requirements for the F-15
STOL and Maneuver Technology Demonstrator
(S/MTD) was to develop and demonstrate an
Integrated Flight and Propulsion Control
(IFPC) System. The IFPC is a Fly-by-Wire (FBW)
system that replaced the F-15 mechanical
flight and engine controls. It was a USAF
requirement that the IFPC be fault tolerant
and that loss-of-control not exceed once per
100,000
flights.
A
program goal was that the
IFPC meet
OL
exceed the reliability and main-
tainability of the basic F-15. This goal was
treated as a requirement by McDonnell Aircraft
(MCAIR). This paper describes the architecture
and redundancy management of the IFPC and the
associated aircraft system modifications that
created a robust, fault tolerant and maintain-
able flight/propulsion control system.
INTRODUCTION
Description of F-15 S/MTD
-
The STOL and
Maneuver Technology Demonstrator (S/MTD)
program was defined to investigate potential
solutions to the problem of runway denial. The
program goals were to develop and evaluate
four key technologies which could assist in
the overall solution. These are:
a) Two dimensional, thrust vectoring/thrust
reversing engine exhaust nozzles
b) Integrated flight/propulsion control
system
c) Rough field landing gear
d) Advanced pilot/vehicle interface
The aircraft chosen as the demonstrator was
TF-15-1, the first two-place F-15. It was
redesignated an NF-15B. The modifications to
the test aircraft are shown in Figure 1.
SlMTD Aircraft Modifications
Fully
Integrated FlighV Instrumented
Propulsion Control
.
Controllers
?\
.
Actuators
STOL
.
soliware
Canards7
\
fi/
Landing Gear
Figure
1
Fairings
Mounts
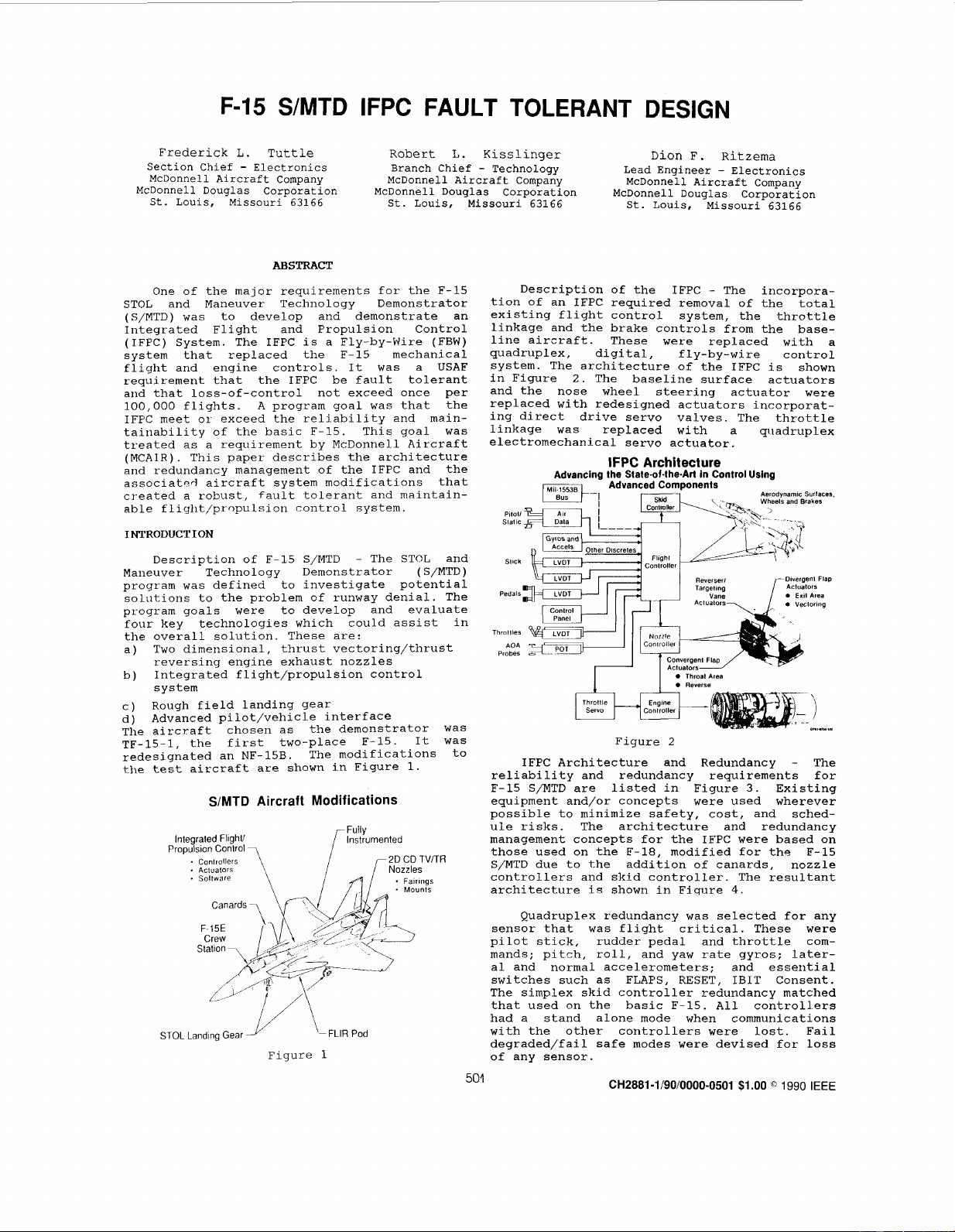
Description
of
the IFPC
-
The incorpora-
tion of an IFPC required removal of the total
existing flight control system, the throttle
linkage and the brake controls from the base-
line aircraft. These were replaced with a
quadruplex, digital, fly-by-wire control
system. The architecture of the IFPC is shown
in Figure
2.
The baseline surface actuators
and the nose wheel steering actuator were
replaced with redesigned actuators incorporat-
ing direct drive servo valves. The throttle
linkage was replaced with a qiiadruplex
electromechanical servo actuator.
IFPC
Architecture
Advancina the State-of.the-Art in Control Using
Pedals
Throllles
AOA
Probes
Throat Area
I
Reverse
Servo Controller
-
O",.,","
.-
Figure
2
IFPC Architecture and Redundancy
-
The
reliability and redundancy requirements for
F-15 S/MTD are listed in Figure
3.
Existing
equipment and/or concepts were used wherever
possible to minimize safety, cost, and sched-
ule risks. The architecture and redundancy
management concepts for the IFPC were based
on
those used on the F-18, modified for th? F-15
S/MTD due to the addition of canards, nozzle
controllers and skid controller. The resultant
architecture
i.;
shown in Fiqure
4.
Quadruplex redundancy was selected for any
sensor that was flight critical. These were
pilot stick, rudder pedal and throttle com-
mands; pitch, roll, and yaw rate gyros; later-
al and normal accelerometers; and essential
switches such as FLAPS, RESET, IBlT Consent.
The simplex skid controller redundancy matched
that used on the basic F-15. All controllers
had a stand alone mode when communications
with the other controllers were lost. Fail
degraded/fail safe modes were devised for loss
of any sensor.
CH2881-1/90/0000-0501
$1
.OO
'
1990
IEEE
501
资源评论













