
Saber2016 与 MATLAB R2014b 联合仿真设置步骤
Saber 是一款由美国思科公司推出的专业模拟及混合信号仿真软件,广泛用于电力、电子、
航空、运输等领域。现在随着系统日趋庞大复杂,系统间软硬件之间交互日趋复杂,使用
saber&MATLAB 进行联合仿真可以同时验证系统软硬件设计。
但是如何实现两款软件间的互相通信和连接呢?网上的教程已经过于陈旧,在这里笔者经过
多次实践终于摸清规律并联合仿真成功。
我安装的软件分别是 saber2016 与 MATLAB R2014b(64bit)
具体教程:
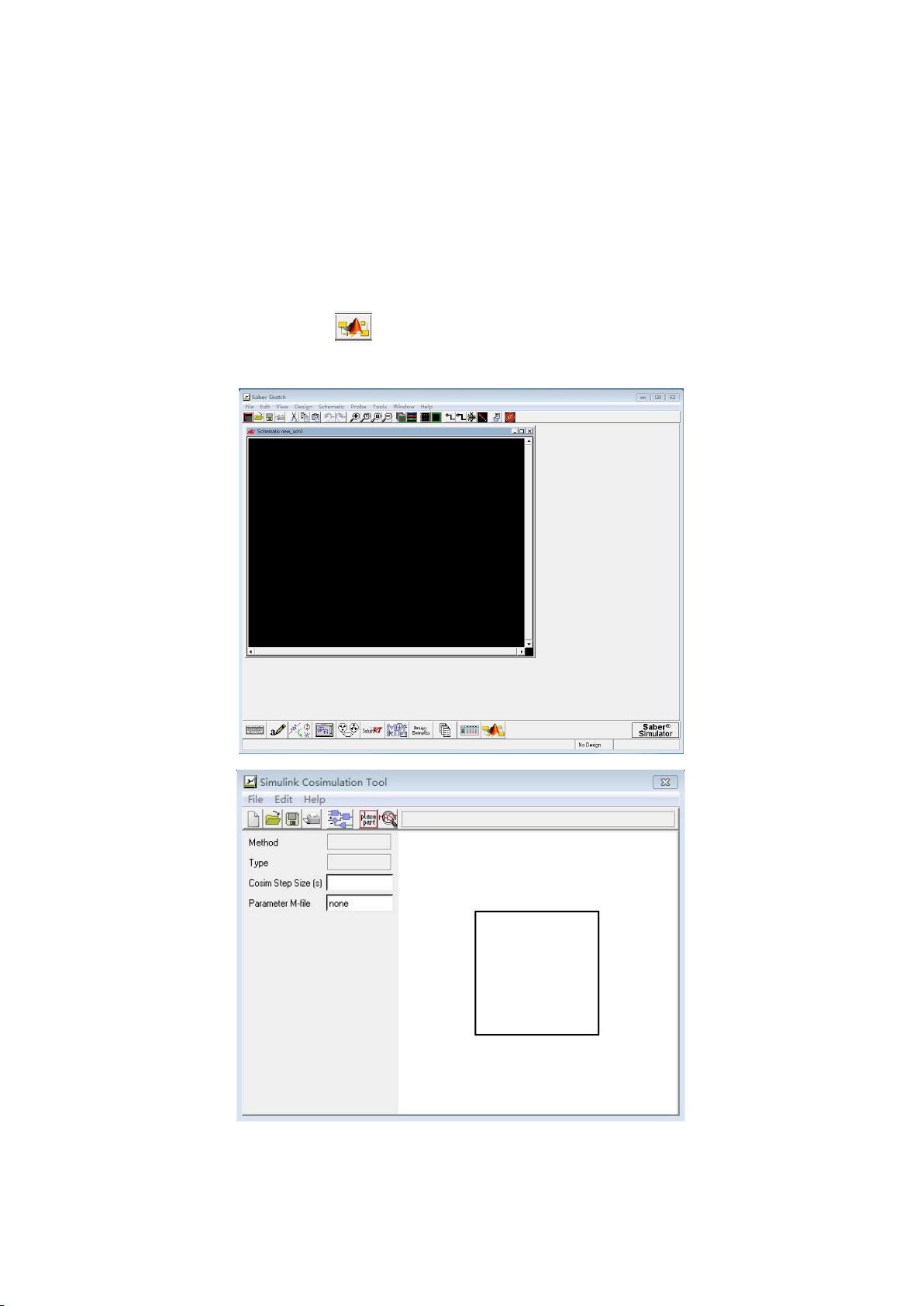
1、 打开 saber sketch,点击 。弹出 Simulink Cosimulation Tool 窗口。

剩余6页未读,继续阅读
资源评论


谁没个freestyle
- 粉丝: 1
- 资源: 1









最新资源
- 毕设-PHP-[整站程序]迷魂记 第二版(粉色迷魂)_ver330.zip
- 毕设-PHP-[整站程序]漂亮的全站程序-JOYS的小窝_free531.zip
- 毕设-PHP-[整站程序]清风千年整站系统 V5.0 (附PSD源文件)_qfkzweb_free5_php5_gbk32.zip
- 毕设-PHP-[整站程序]情感家园站 v3.0 For 个人版_qgweb30fp33.zip
- 毕设-PHP-[整站程序]天地网络-网络学院全站_tiandinetxy36.zip
- 毕设-PHP-[整站程序]三雷11种语言建站系统(网络版) v6.0_30tnetwork34.zip
- 毕设-PHP-[整站程序]校内网代码站_xndm37.zip
- 毕设-PHP-[整站程序]雪缘动感在线系统_luckysnow38.zip
- 毕设-PHP-[整站程序]亿网家教网站管理程序 v2.0_ywjj39.zip
- 毕设-PHP-[整站程序]与非IT数码产品门户程序_ityesno40.zip
- 电子学习资料设计作品全资料单片机定时闹钟资料
- 目标检测-电线杆折断检测数据集14000张YOLO+VOC格式.zip
- 索尼(SONY)Walkman NW-ZX300_V2_00
- 在线封装双端APP源码 简单搭建扔进服务器或主机即可
- 电子学习资料设计作品全资料单片机控制LED点阵显示器
- Java毕设项目:基于spring+mybatis+maven+mysql实现的在线购物系统【含源码+数据库+毕业论文】
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


