

扫地机器人(自动打扫机)的设计方案
1. 绪论
随着现代社会生活节奏的加快,人们或忙于工作,或享受生活,时间越来越
宝贵,所以不会把它浪费在整理家务和打扫卫生方面。收入水平的不断提高使得
人们对生活质量的要求越来越高,高品质的生活首先要保证居住环境的干净卫生,
因此大家渴望找到一种机器人,能够智能的打扫房间卫生。
机器人作为人类 20 世纪最伟大的发明之一,在短短的几十年内发生了日新
月异的变化。近几年机器人已成为高技术领域内具有代表性的战略目标。机器人
技术的出现和发展,不但使传统的工业生产面貌发生根本性变化,而且将对人类
社会产生深远的影响。随着社会生产技术的飞速发展,机器人的应用领域不断扩
展。从自动化生产线到海洋资源的探索,乃至太空作业等领域,机器人可谓无所
不在。目前机器人已经走进人们的生活与工作,机器人已经在很多的领域代替着
人类的劳动,发挥着越来越重要的作用,人们已经离不开机器人的帮助。机器人
工程是一门复杂的学科,它集工程力学、机械制造、电子技术、技术科学、自动
控制等为一体。目前对机器人的研究已经呈现出专业化和系统化,一些信息学、
电子学方面的先进技术正越来越多地应用于机器人领域。
目前机器人行业的发展与 30 年前的电脑行业极为相似。今天在汽车装配线
上忙碌的一线机器人,正是当年大型计算机的翻版。而机器人行业的利基产品也
同样种类繁多,比如协助医生进行外科手术的机械臂、在伊拉克和阿富汗战场上
负责排除路边炸弹的侦查机器人、以及通过编译程序使其能做整套表演动作的舞
蹈机器人,还有不少参考人、狗、恐龙等动物的模样制造机器人玩具。
扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电
器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作。一般采用
刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理
的功能。一般来说,将完成清扫、吸尘、擦地工作的机器人,也统一归为扫地机
器人。扫地机器人也是当下比较流行的一种机器人,随着不断的研究发展智能化
大幅度提高,能够自我定位、感应障碍物、规划路径以及自动充电。
2. 扫地机器人的技术指标
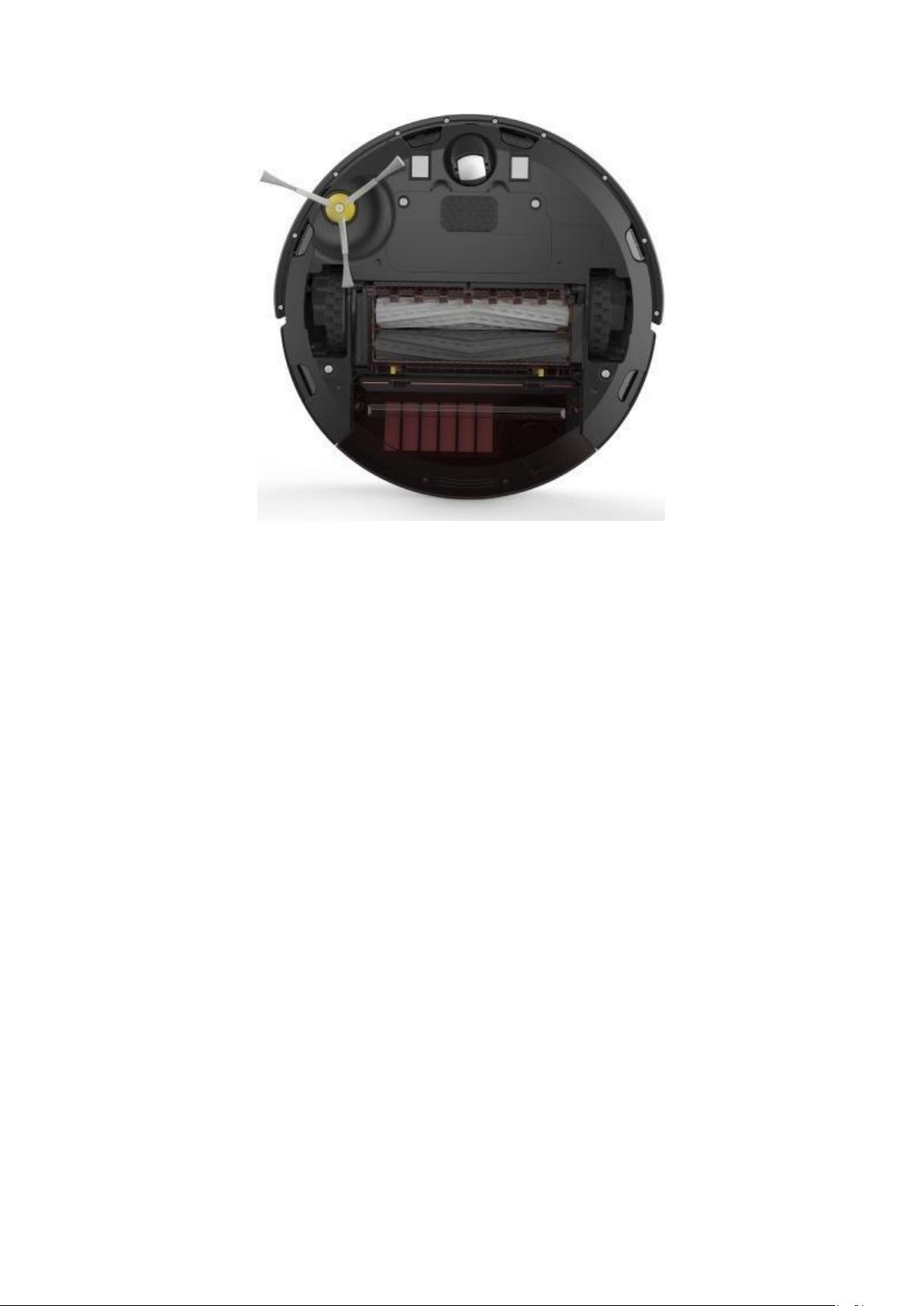
综合考虑经济型和先进性的原则,参考淘宝网在售产品,我选择了一款扫地
机器人以作对比,实物如图 2.1 所示。该产品采用革命性清扫系统,真空龙卷大
吸力(普通机器人的 5 倍),无毛刷设计,首创滚筒吸取器,将适配器与座充合
二为一(简约、美观而且不占空间),零部件高度模块化,可自由拆卸更换,垃
圾盒、独立滤网仓方便抽取和清理。

剩余13页未读,继续阅读













- 1
- 2
前往页