1 .一种十二自由度仿生四足机器人,其特征在于:包括身体部件、4个连接部件、4个腿
部部件和头部部件;
身体部件前端连接头部部件;身体部件两侧分别对称连接有2个连接部件;每个连接部
件均连接一个腿部部件;
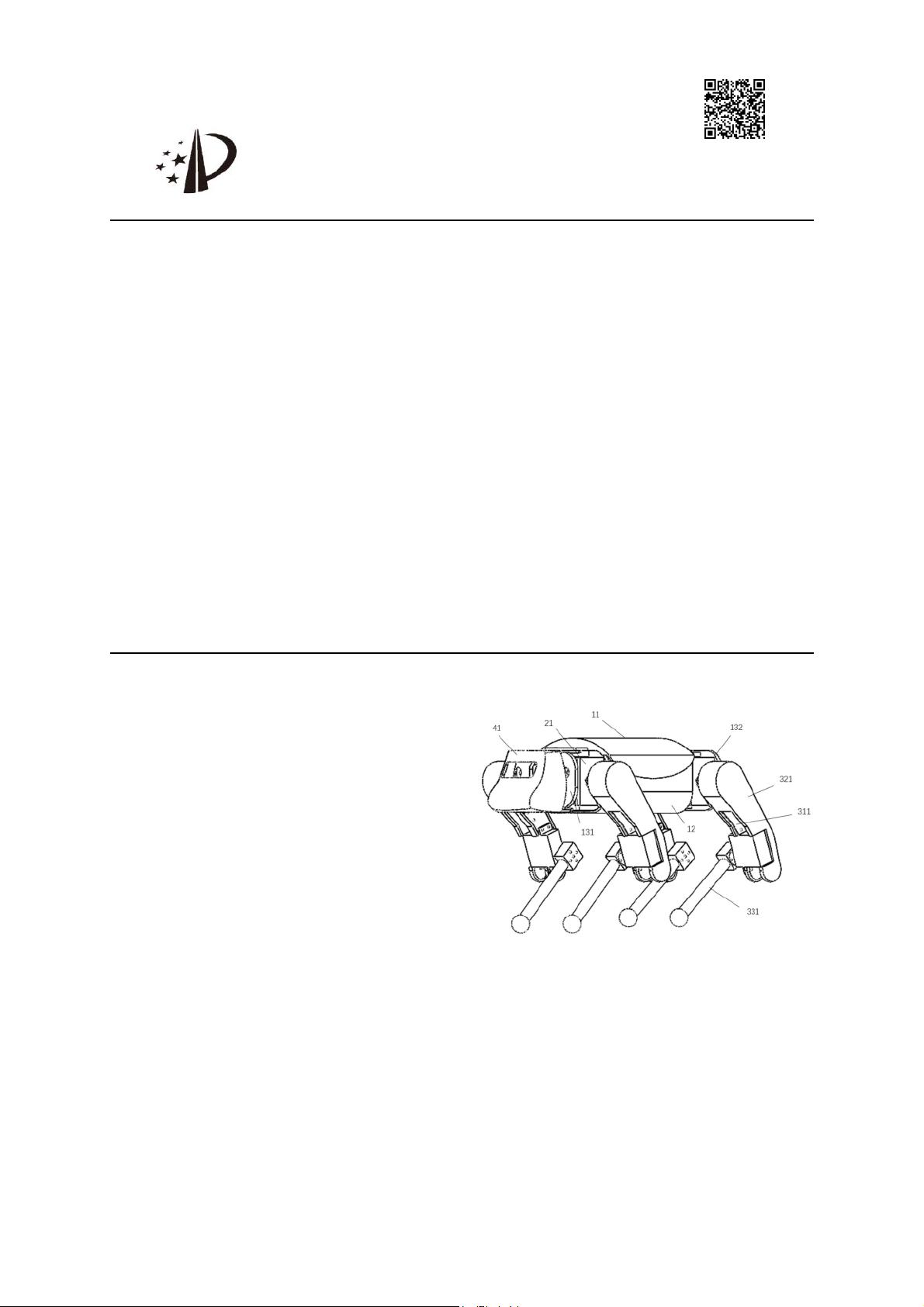
所述身体部件包括前舵机固定板(131)、后舵机固定板(132)、外壳、底盘板以及位于底
盘板两侧的两个底盘固定板;外壳包括上壳(11)与下壳(12);
两个底盘固定板上均设有卡槽及若干螺孔,用于分别上壳(11)与下壳(12)连接,构成
机器人主框架;底盘板固定在两个底盘固定板的卡槽之间,位于机器人主框架内,用于承载
相应的控制核心板;
前舵机固定板(131)分别与两个底盘固定板的前端连接,后舵机固定板(132)分别与两
个底盘固定板的后端连接;前舵机固定板(131)和后舵机固定板(132)上设有若干螺纹孔,
前舵机固定板(131)两端分别连接对称连接有2个连接部件,后舵机固定板(132)两端分别
连接对称连接有2个连接部件;
连接部件包括肩部外壳(21)和第一舵机(43);
其中,第一舵机(43)固定于肩部外壳(21)内;第一舵机(43)连接前舵机固定板(131)或
后舵机固定板(132);肩部外壳(21)设有螺孔,用于连接腿部部件;
通过第一舵机(43)提供的旋转自由度,控制核心板驱动连接部件绕前舵机固定板
(131)或后舵机固定板(132)进行转动;
大腿部件包括大腿内侧(311)、腿部外壳(321)、第二舵机(41)和第三舵机(42);
其中,第二舵机(41)和第三舵机(42)分别固定于大腿内侧(311)的两端,腿部外壳
(321)覆盖于大腿内侧(311)、第二舵机(41)和第三舵机(42)上,用于遮掩连接线、第二舵机
(41)和第三舵机(42);
第二舵机(41)连接肩部外壳(21),通过第二舵机(41)提供的旋转自由度,控制核心板
驱动大腿部件绕肩部外壳(21)进行转动,且第一舵机(43)与第二舵机(41)的运动方向垂
直;
第三舵机(42)通过安装孔与小腿部件相连,通过第三舵机(42)提供的旋转自由度,控
制核心板驱动小腿部件绕大腿部件进行转动,以实现四足机器人的各种行为;
腿部部件包括通过舵机连接的大腿部件和小腿部件,采用全肘式腿部构型,通过连杆
传动,驱动小腿部件进行运动;
在第三舵机(42)和大腿内侧(311)末端的连接处采用螺钉和螺母进行固定,相较于传
统的用热熔胶粘合的方式提升了固定的便利性并增加了四足机器人整体的刚度;
头部部件包括头部外壳和位于头部外壳内部的深度摄像机,
头部外壳中设有若干安装孔,通过分别与上壳(11)和前舵机固定板(131)连接,固定于
前舵机固定板(131)前方;
头部外壳前端设置有眼部孔位,深度摄像机连接核心控制板,用于传输从眼部孔位处
获取的数据;
小腿部件包括长杆(331)和固定于长杆(331)末端的球状的足部构件;
其中,长杆(331)顶端连接第三舵机(42),通过第三舵机(42)提供的旋转自由度,控制
核心板驱动长杆(331)绕大腿部件的末端进行转动,以减小腿部的惯性张量,降低运行噪
权 利 要 求 书
1/2 页
2