
(19)国家知识产权局
(12)发明专利申请
(10)申请公布号
(43)申请公布日
(21)申请号 202311489265 .8
(22)申请日 2023 .11 .09
(71)申请人 杭州格物机器人有限公司
地址 311121 浙江省杭州市余杭区仓前街
道海智中心1幢2楼201-2室
(72)发明人 李超 陈申红 李丰
(74)专利代理机构 杭州奇炬知识产权代理事务
所(特殊普通合伙) 33393
专利代理师 林伟
(51)Int.Cl .
B62D
57/032
(2006 .01)
B60P
3/11
(2006 .01)
B64U
70/90
(2023 .01)
B64U
70/99
(2023 .01)
B64U
80/86
(2023 .01)
B64U
10/14
(2023 .01)
(54)发明名称
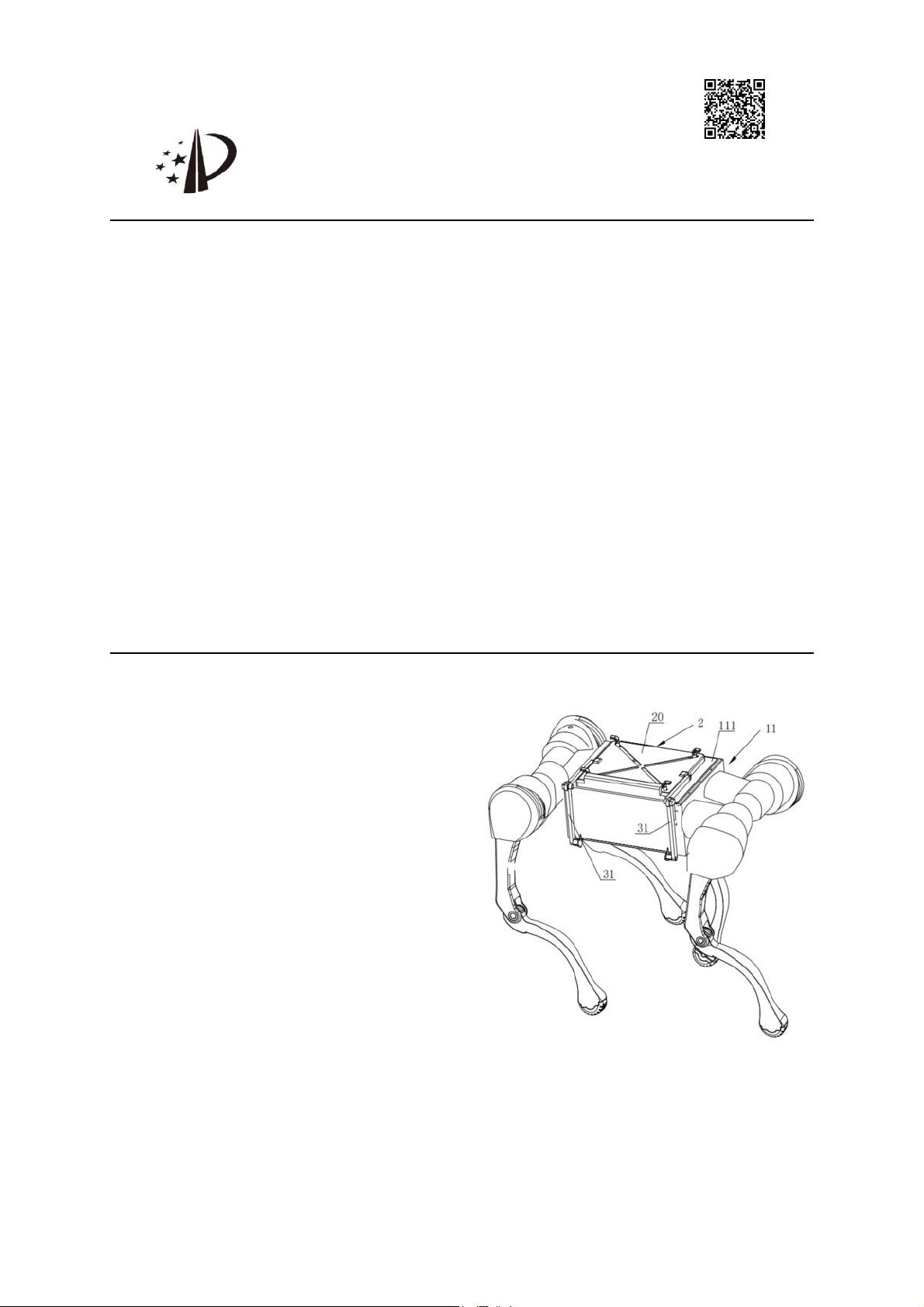
一种无人机起落一体的四足机器人
(57)摘要
本发明公开了一种无人机起落一体的四足
机器人,包括承载盘,所述承载盘通过活动组杆
可活动固定在所述四足机器人的躯干上,所述活
动组杆上设有控制活动组杆运动的控制电机,通
过所述控制电机的带动,所述承载盘可位于所述
躯干的上方或所述躯干的下方,并在所述躯干的
上方和所述躯干的下方之间运动;所述无人机在
所述承载盘上起落,所述承载盘和所述无人机之
间设有用于将无人机和所述承载盘相互固定的
固定机构。本发明中无人机和四足机器人通过承
载盘相互配合使用,两者能够相互分离且独立作
业,不会互相影响作业时的性能,保证作业任务
的完成。
权利要求书2页 说明书5页 附图14页
CN 117382767 A
2024.01.12
CN 117382767 A



剩余21页未读,继续阅读
资源评论


大帅2022
- 粉丝: 1
- 资源: 442









最新资源
- 是一个简单的 MATLAB GUI 示例,用于智能家居控制
- Qt Creator调试视图深度解析:功能、技巧与实践
- Matlab GUI开发:在界面中添加列表框的详细指南
- 易观分析:中国互联网母婴行业年度分析2023.pdf
- 基于javaweb的在线考试系统的设计与实现(论文+源码)-kaic.doc
- 企业教育相关数据集(1992-2022年).xlsx
- Qt Creator调试全攻略:从设置断点到远程调试
- 全国地表水水质自动检测站数据集-逐4小时频率(2021年6月17日-2023年9月20日).txt
- 省级新质生产力相关词频统计数据集.xlsx
- 医药魔方:2024医药投融资交易大会-生物医药企业并购中的知识产权问题
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


