

C 机器人编程
编写一个来回摆动的机器人...........................................................................................................2
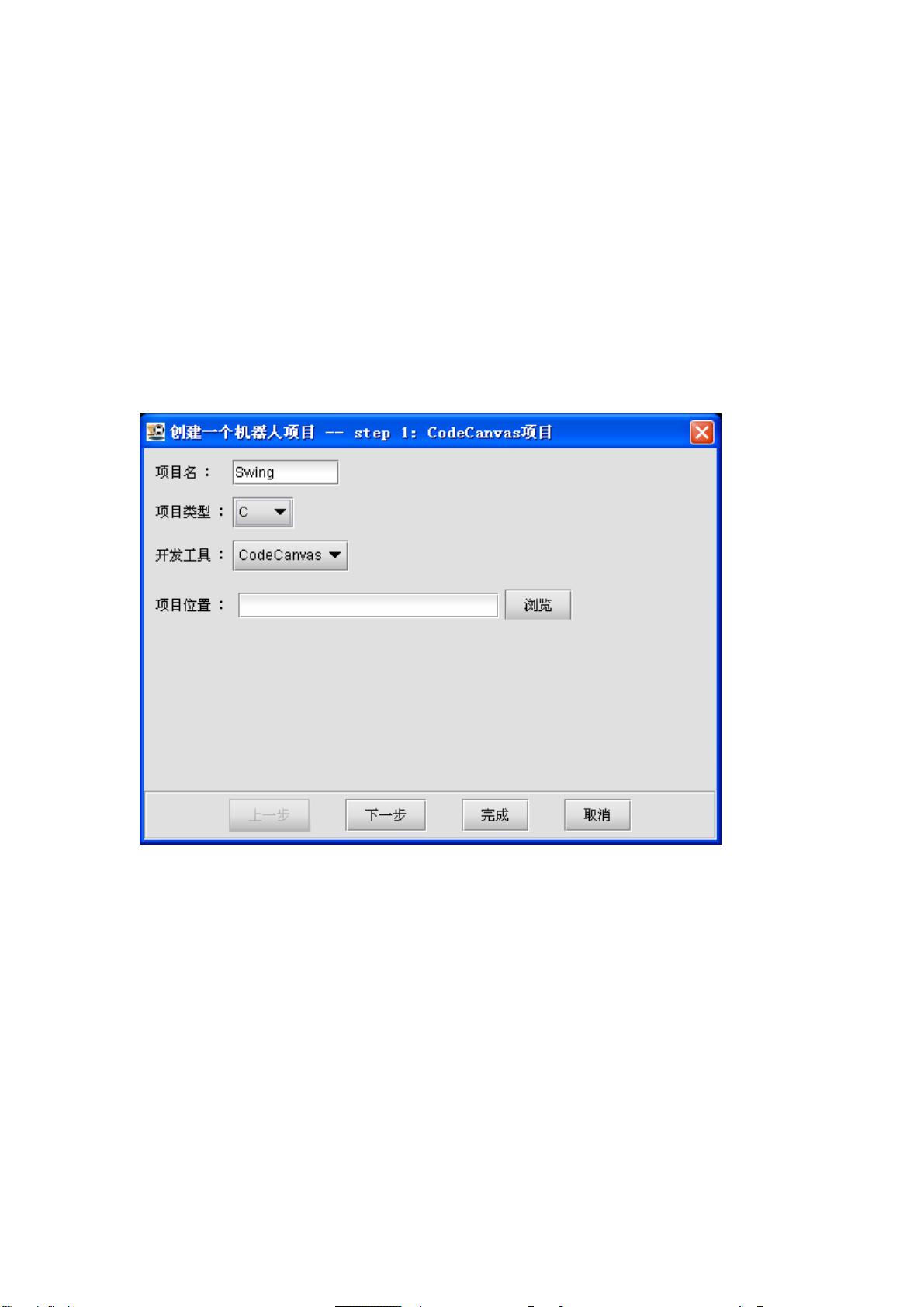
创建机器人...............................................................................................................................2
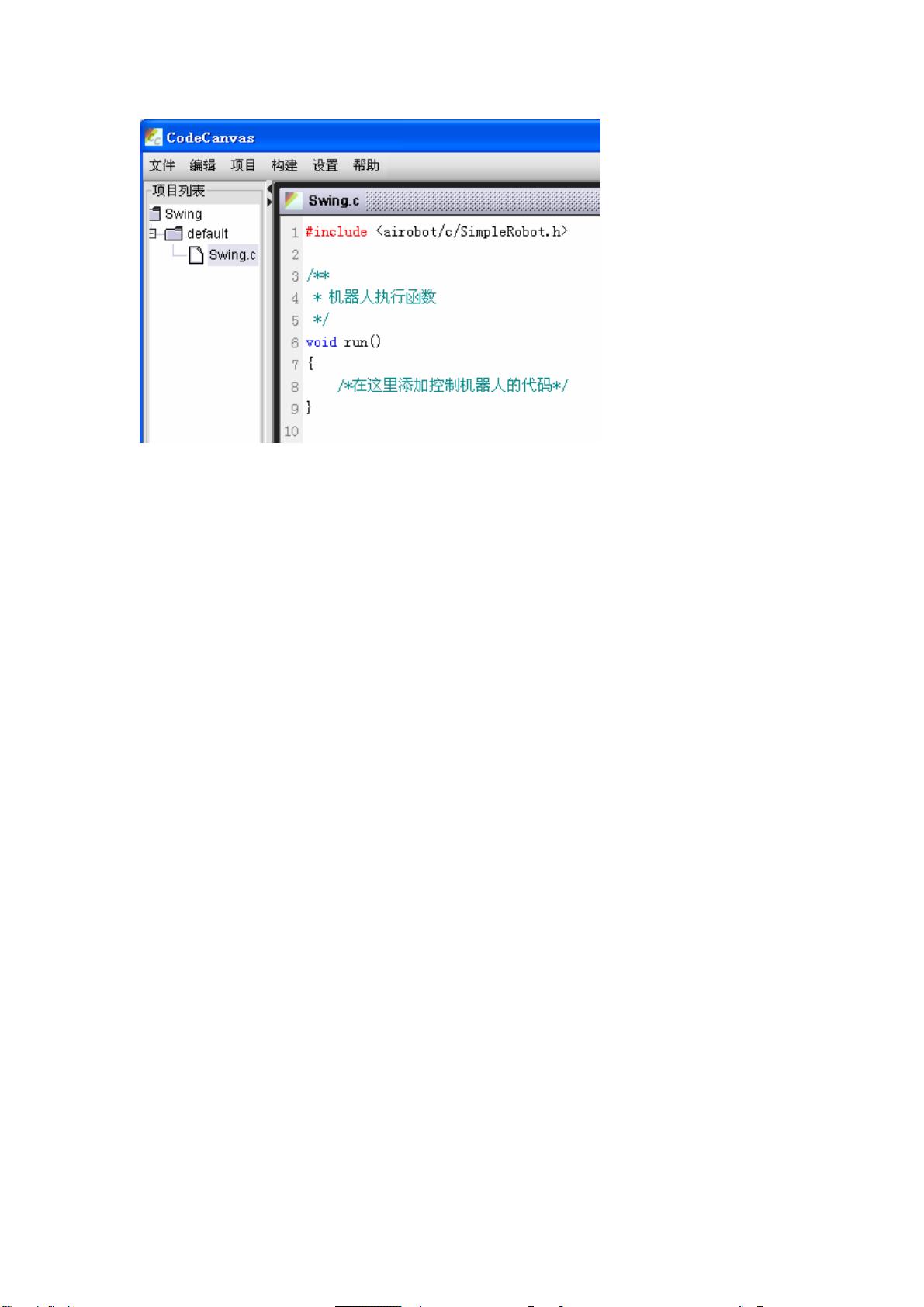
编写机器人代码.......................................................................................................................3
编译机器人...............................................................................................................................3
运行机器人...............................................................................................................................4
代码解析...................................................................................................................................5
打开原有的项目.......................................................................................................................6
系统设定...................................................................................................................................6
实现一个走圆形的机器人...............................................................................................................7
分析...........................................................................................................................................7
代码实现...................................................................................................................................8
两种控制方式的比较...............................................................................................................9
机器人编队.............................................................................................................................10
了解比赛信息.................................................................................................................................11
struct Bot.................................................................................................................................11
获取自己的信息.....................................................................................................................11
获取其他机器人的信息.........................................................................................................12
获取球的信息.........................................................................................................................12
机器人编程接口详解.....................................................................................................................13
Robot.h....................................................................................................................................13
Info.h.......................................................................................................................................13
Operate.h和Debug.h ...............................................................................................................14
各种Toolkit.............................................................................................................................14
常用数学函数.........................................................................................................................14
Action和Action处理函数...............................................................................................................14
Action......................................................................................................................................14
Action处理函数......................................................................................................................15
剩余15页未读,继续阅读
资源评论

 sanguo19872013-03-22参加机器人大赛了,读一下。。。
sanguo19872013-03-22参加机器人大赛了,读一下。。。 苏萨玛2015-03-19对新手还是有一定的帮助的 新手推荐
苏萨玛2015-03-19对新手还是有一定的帮助的 新手推荐 gly_lg2013-02-18谢谢楼主分享,对新手很有用
gly_lg2013-02-18谢谢楼主分享,对新手很有用- chandlearn2012-06-19基本简单的引导介绍

erosmickey
- 粉丝: 3
- 资源: 10









最新资源
- C#物联订单仓储综合管理系统源码 物联综合管理系统源码数据库 SQL2008源码类型 WebForm
- 2024年最新敏感词库(7万余条)
- java带财务进销存ERP管理系统源码数据库 MySQL源码类型 WebForm
- java制造业MES生产管理系统源码 MES源码数据库 MySQL源码类型 WebForm
- 基于无人机航拍数据实现的三维场景重建python源代码+文档说明+数据集(高分项目)
- 【重磅,更新!】全国2000-2022年植被指数数据(分辨率30m)
- 包含Qt5Core.dll Qt5Gui.dll Qt5Network.dll Qt5Svg.dll Qt5Widgets.dl
- python3.6 get-pip.py
- python期末大作业基于ResNet的人脸表情识别项目源码+数据集+模型文件(高分项目)
- C#大型多门店4S连锁汽车维修保养管理系统源码(带文档)数据库 SQL2008源码类型 WebForm
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


