
1
《 遥感应用分析原理与方法 》课程
遥感图像数据下载说明
几点说明:
z 数据下载的方式有很多,这里只是举个例子,并不一一列举。
z 此文档以北京地区为例,下载 TM 的影像数据。
步骤:
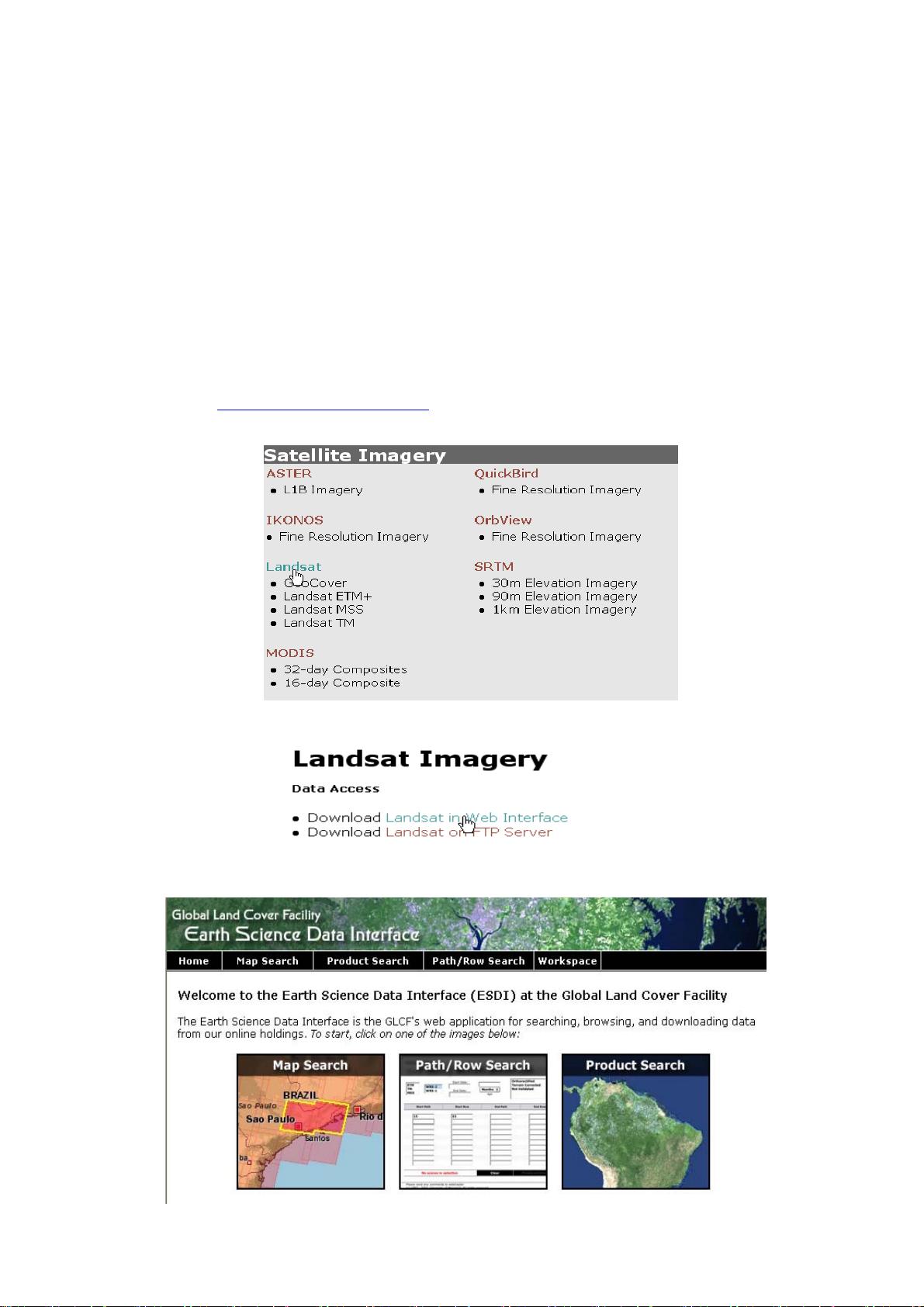
1. 登录 http://glcf.umiacs.umd.edu/data/,在此页面,大家可以看到有各种不同的影像分类,像
ASTER,QUICKBIRD,Landsat 等,此例选择 Landsat,如图单击 Landsat,
2. 进行上一步骤之后,我们要选择数据访问接口,单击 Landsat in Web Interface,如图
3. 上步之后, 出现如图界面,
资源评论


eleanorqing
- 粉丝: 0
- 资源: 1









最新资源
- 包括缺陷和有限视场效应的Etalon模型 matlab代码.rar
- 车辆横向动力学模型simulink.rar
- 差分驱动和全球定位模块集simulink实现.rar
- 创建一个用于单目标或多目标的雷达数据立方体 matlab代码.rar
- 从零开始训练的裂缝二元分类对象检测和语义分割指标 matlab代码.rar
- 从船舶偏移量到静水压力 matlab代码.rar
- 多元闭合偏态正态分布Matlab代码.rar
- 多普勒雷达信号处理的示例 matlab代码.rar
- 电子战发射机检测和地理定位的MATLAB代码.rar
- 发射器:传输频率为千赫兹的正弦波信号 目标:改变传输信号的频率 接收器:接收信号并产生多普勒频率simulink.rar
- 二阶非线性系统的相平面绘制 matlab代码.rar
- 二项分布探索器Matlab代码.rar
- 改进的LSHADE-SPACMA算法与NSM方法附Matlab代码.rar
- 改进的MadDE算法与NSM方法Matlab代码.rar
- 分布式空时编码的多符号差分检测 matlab代码.rar
- 概率数据关联滤波器(PDAF)Matlab代码.rar
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


