第 1 页 共 18 页
液体点滴速度监控装置
[摘要] 该装置实时地监测液体点滴速度,通过单片机对信息的分析和处理,由主机发出相
应的指令,调整系统的工作平稳,构成了一个高性能的闭环控制系统。实现了对点滴输液
速度的直观监测,同时对一些异常情况的出现可实施报警。利用该装置还能通过主控平台
对各个分立系统信息实施自动化、智能化的集中处理。能方便、简易的操作和使用,对医
疗具有很强的实用性。
[关键词] 实时监控 红外传感 闭环控制 步进电机
一、 方案设计与论证
根据题目要求和原输液装置的特点,提出以下三种方案:
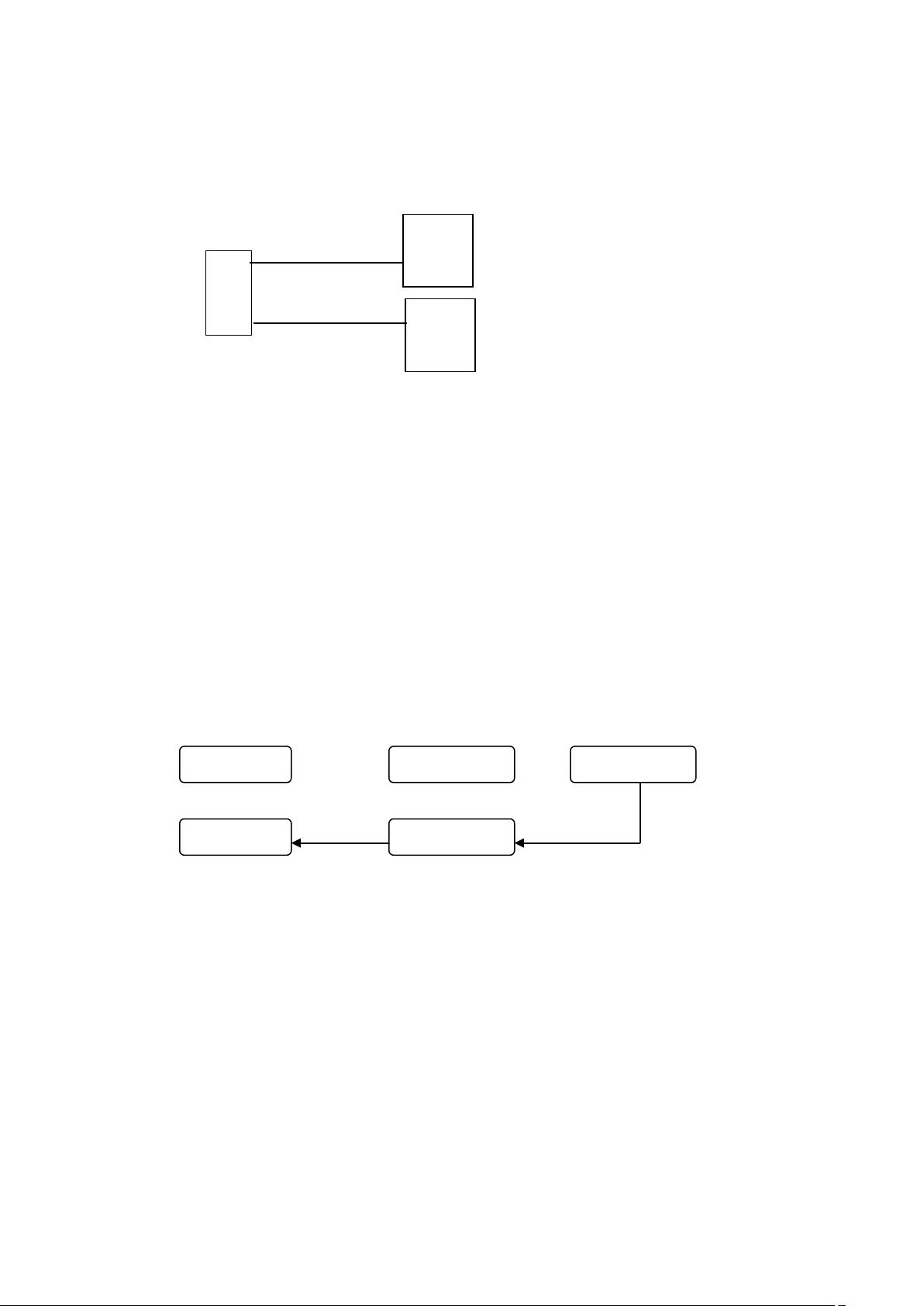
1、方案一
直接在滴斗处用两电极棒的方法。
图 1
此方案的传感器采用简单的液体导电原理,在滴斗处安装两个电极。当水滴落下时,
电极导通,从而使待测量的变化转化为高低电平电信号。采用伺服电机改变系统装置中液
瓶与受液瓶的高度,达到改变点滴速度,从而进行控制。
2、方案二
把通过电机改变系统装置高度的方法,改为控制步进电机对输液管进行压缩或缓松,
从而实现对点滴速度的改变。采用交流电动机控制 H2 的高度。即采用红外传感器测量滴
斗滴液,送至单片机接口计数,通过数字模拟转换,将其转换为 4—20MA 标准电流值,同
时通过键盘输入给定每分钟的滴数,再将此滴数将其转换为 4—20MA 标准电流值,将此两
个信息同时进入数字 PID 调节器。通过偏差计算再输出一组 4—20MA 标准电流值,通过变
频调速器控制电动机调节 H2 的高度,来控制滴斗滴数。此方案的优点是,完全按目前电
气工程标准化运作,可以在很短时间完成。
2、 方案三
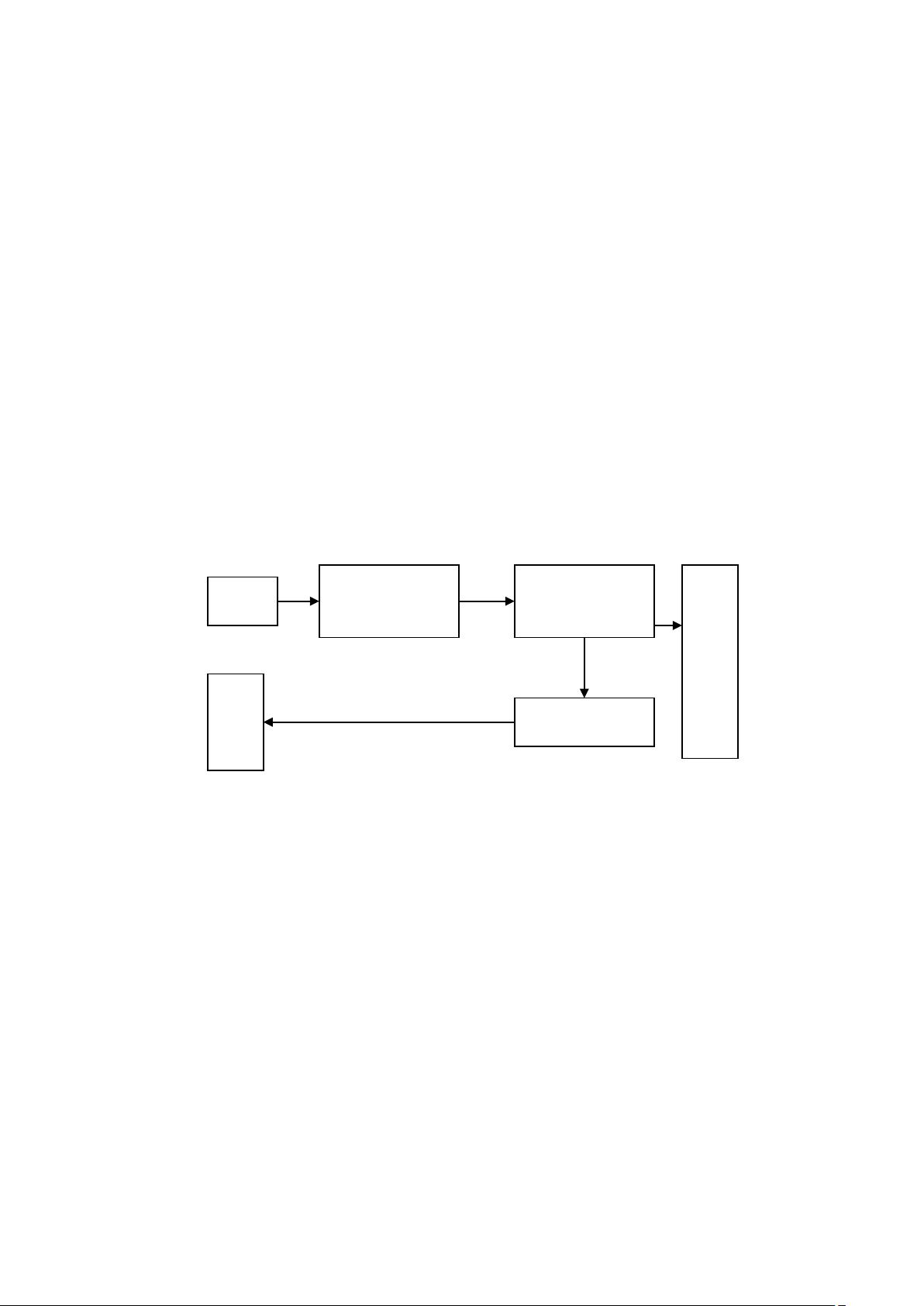
根据点滴装置的特点,通过对装置的某一位置进行监测和控制,达到对整个系统液体
传感器
信号处理
人机对话界面
速度控制
电机驱动
待 测
和 控
制 量