使用编码掩码的快照HDR视频构造_Snapshot HDR Video Construction Using Coded Mas
版权申诉
74 浏览量
2022-01-14
23:37:50
上传
评论
收藏 15.38MB PDF 举报

SNAPSHOT HDR VIDEO CONSTRUCTION USING CODED MASK
A PREPRINT
Masheal M. Alghamdi
National Center for Data Analytics and Artificial Intelligence
KACST
Qiang Fu
Visual Computing Center
KAUST
Thuwal, SA
Ali Thabet
Visual Computing Center
KAUST
Thuwal, SA
Wolfgang Heidrich
Visual Computing Center
KAUST
Thuwal, SA
December 7, 2021
ABSTRACT
This paper study the reconstruction of High Dynamic Range (HDR) video from snapshot-coded LDR
video. Constructing an HDR video requires restoring the HDR values for each frame and maintaining
the consistency between successive frames. HDR image acquisition from single image capture, also
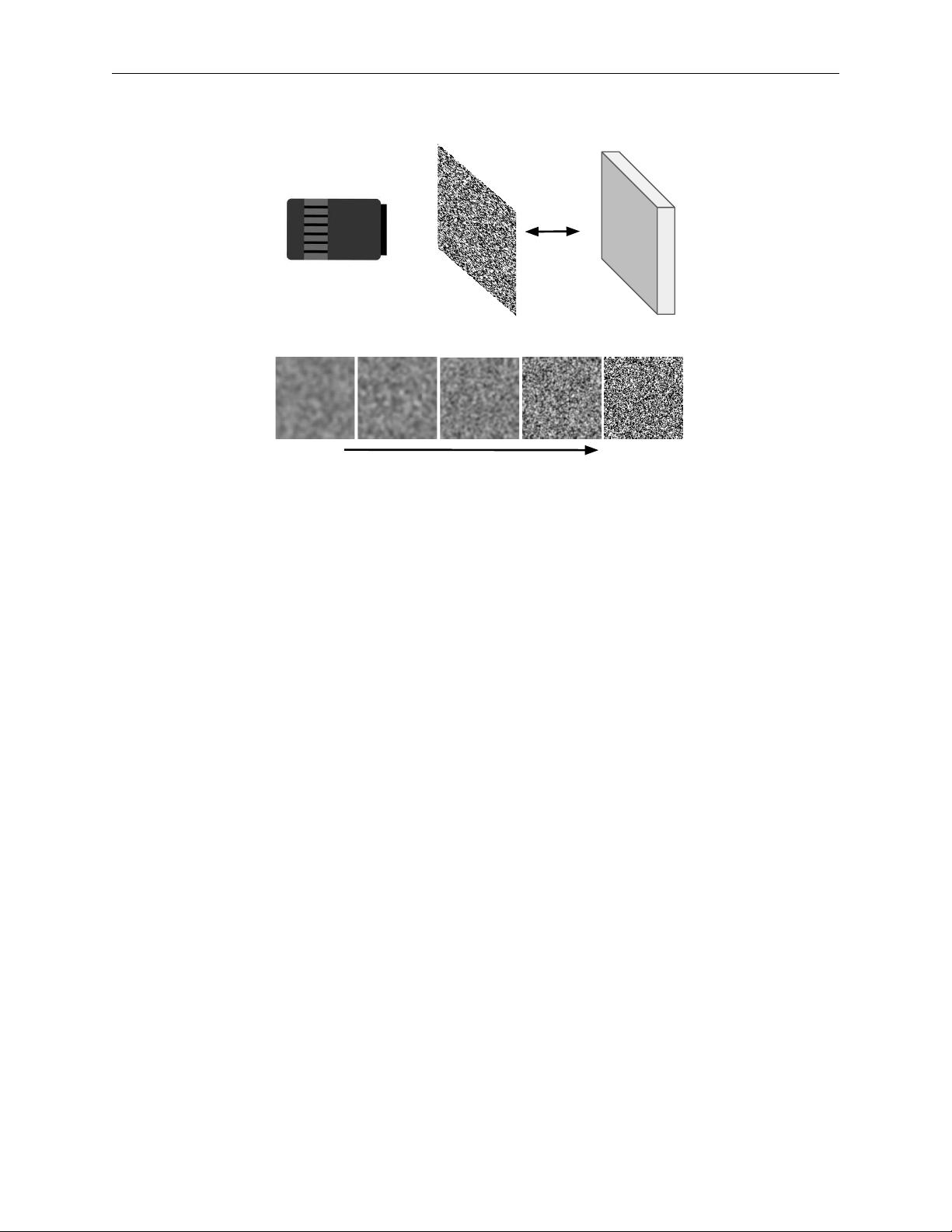
known as snapshot HDR imaging, can be achieved in several ways. For example, the reconfigurable
snapshot HDR camera is realized by introducing an optical element into the optical stack of the
camera; by placing a coded mask at a small standoff distance in front of the sensor. High-quality HDR
image can be recovered from the captured coded image using deep learning methods. This study
utilizes 3D-CNNs to perform a joint demosaicking, denoising, and HDR video reconstruction from
coded LDR video. We enforce more temporally consistent HDR video reconstruction by introducing
a temporal loss function that considers the short-term and long-term consistency. The obtained results
are promising and could lead to affordable HDR video capture using conventional cameras.
Keywords high dynamic range imaging · image and video processing · computational photography
1 Introduction
The human visual system can sense up to 20 F-stops of luminance contrast with minimal eye adaption Banterle et al.
[2017]. Modern image sensor technology is incapable of matching this performance and reproducing the full dynamic
range of natural scenes within a single exposure. The challenge of single shot (or snapshot) High Dynamic Range
(HDR) imaging arises from the tremendous gap between the huge intensity range in natural scenes and the very limited
bit depths that modern camera sensors can offer.
Modern films are often shot using cameras with a higher dynamic range, which mainly require both HDR shooting and
rendering in addition to special effects, particularly seamless mixing of natural and synthetic footage. HDR video is
also required in all applications that require high accuracy in capturing temporal aspects of the changes in a scene. HDR
video capture is essential for specific industrial tracking processes, such as melting, machine vision such as autonomous
driving, and monitoring systems.
In Alghamdi et al. [2019, 2021] we proposed a computational imaging solution to single shot HDR imaging by minimal
modifications of the camera to implement per-pixel exposure, as well as a deep learning algorithm based on the inception
network to reconstruct HDR images. Specifically we explored a variant of the spatially modulated HDR camera design
that does not require a custom sensor, and can be incorporated into any existing camera, be it a smartphone, a machine
arXiv:2112.02522v1 [eess.IV] 5 Dec 2021

剩余12页未读,继续阅读







评论0
最新资源