
Rank & Sort Loss for Object Detection and Instance Segmentation
Kemal Oksuz, Baris Can Cam, Emre Akbas
∗
, Sinan Kalkan
*
Dept. of Computer Engineering, Middle East Technical University, Ankara, Turkey
{kemal.oksuz, can.cam, eakbas, skalkan}@metu.edu.tr
Abstract
We propose Rank & Sort (RS) Loss, a ranking-based loss
function to train deep object detection and instance seg-
mentation methods (i.e. visual detectors). RS Loss super-
vises the classifier, a sub-network of these methods, to rank
each positive above all negatives as well as to sort positives
among themselves with respect to (wrt.) their localisation
qualities (e.g. Intersection-over-Union - IoU). To tackle the
non-differentiable nature of ranking and sorting, we refor-
mulate the incorporation of error-driven update with back-
propagation as Identity Update, which enables us to model
our novel sorting error among positives. With RS Loss, we
significantly simplify training: (i) Thanks to our sorting ob-
jective, the positives are prioritized by the classifier with-
out an additional auxiliary head (e.g. for centerness, IoU,
mask-IoU), (ii) due to its ranking-based nature, RS Loss is
robust to class imbalance, and thus, no sampling heuris-
tic is required, and (iii) we address the multi-task nature
of visual detectors using tuning-free task-balancing coeffi-
cients. Using RS Loss, we train seven diverse visual detec-
tors only by tuning the learning rate, and show that it con-
sistently outperforms baselines: e.g. our RS Loss improves
(i) Faster R-CNN by
∼
3 box AP and aLRP Loss (ranking-
based baseline) by
∼
2 box AP on COCO dataset, (ii) Mask
R-CNN with repeat factor sampling (RFS) by 3.5 mask AP
(
∼
7 AP for rare classes) on LVIS dataset; and also out-
performs all counterparts. Code is available at: https:
//github.com/kemaloksuz/RankSortLoss.
1. Introduction
Owing to their multi-task (e.g. classification, box regres-
sion, mask prediction) nature, object detection and instance
segmentation methods rely on loss functions of the form:
L
V D
=
X
k∈K
X
t∈T
λ
k
t
L
k
t
, (1)
which combines L
k
t
, the loss function for task t on stage
k (e.g. |K| = 2 for Faster R-CNN [32] with RPN and R-
*
Equal contribution for senior authorship.
Classification Logits
0 1 2 3 4 5 6 7
3.0
2.0
1.0
0.0
-1.0
-2.0
-3.0
-4.0
Binary Labels
1 1 0 0 1 0 1 0
Target Ranking (𝑖)
0, 4, 1
, 6 (any order
)
2
, 3, 5, 7 (any order
)
Anchor ID (𝑖 )
(a) Ranking positives (+) above negatives (-)
(b) Rank&Sort Loss: Rank (+) above (-) & Sort (+) wrt their IoU labels
Classification Logits
0 1 2 3 4 5 6 7
3.0
2.0
1.0
0.0
-1.0
-2.0
-3.0
-4.0
Continuous Labels (IoU)
0.9
0.4
0.0
0.0
0.8
0.0
0.1
0.0
RS Loss Target Ranking (𝑖) 0 4 1 6
2
, 3, 5, 7 (any order
)
Anchor ID (𝑖 )
(+)
(-)
(+)
(-)
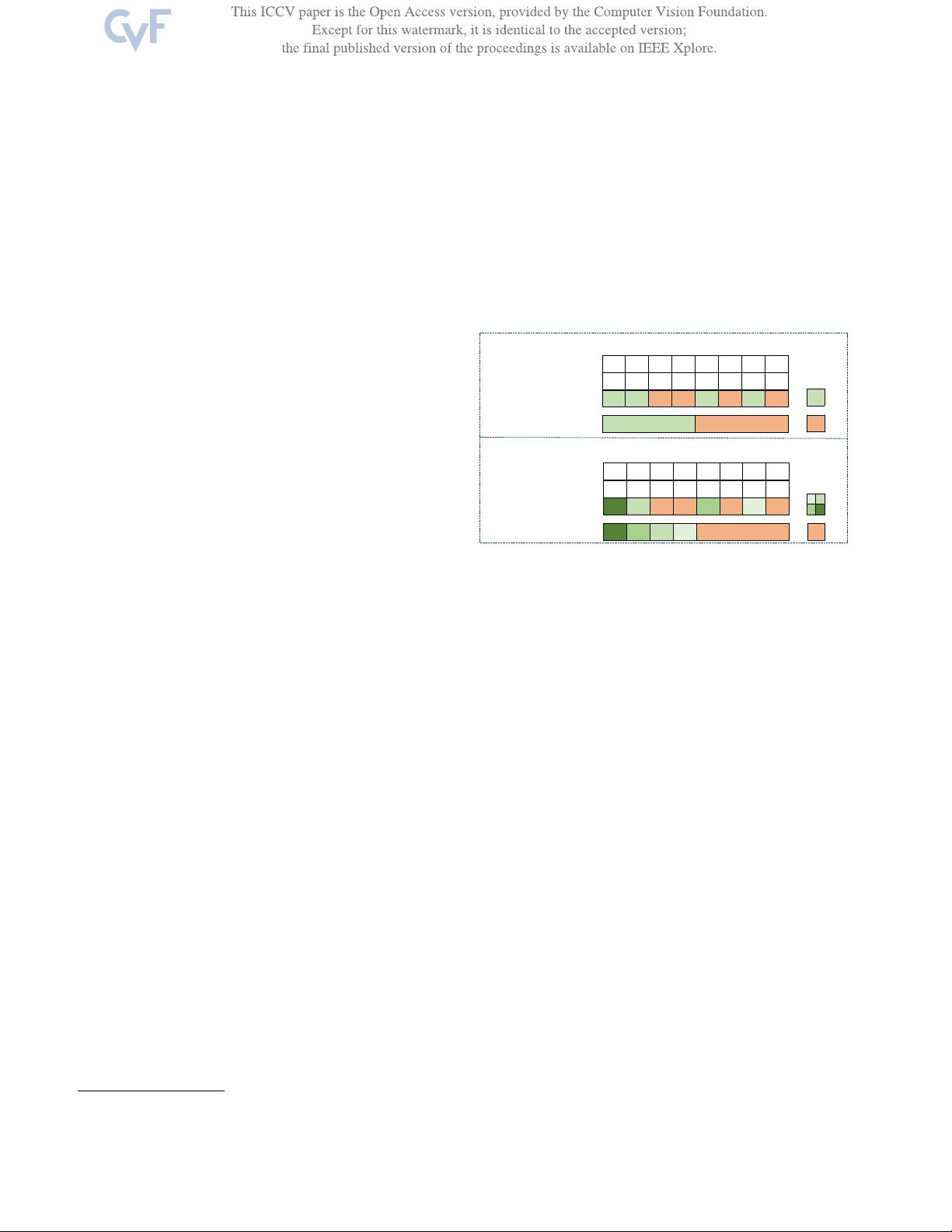
Figure 1. A ranking-based classification loss vs RS Loss. (a) En-
forcing to rank positives above negatives provides a useful objec-
tive for training, however, it ignores ordering among positives. (b)
Our RS Loss, in addition to raking positives above negatives, aims
to sort positives wrt. their continuous IoUs (positives: a green tone
based on its label, negatives: orange). We propose Identity Update
(Section 3), a reformulation of error-driven update with backprop-
agation, to tackle these ranking and sorting operations which are
difficult to optimize due to their non-differentiable nature.
CNN), weighted by a hyper-parameter λ
k
t
. In such formu-
lations, the number of hyper-parameters can easily exceed
10 [27], with additional hyper-parameters arising from task-
specific imbalance problems [28], e.g. the positive-negative
imbalance in the classification task, and if a cascaded ar-
chitecture is used (e.g. HTC [7] employs 3 R-CNNs with
different λ
k
t
). Thus, although such loss functions have led
to unprecedented successes, they require tuning, which is
time consuming, leads to sub-optimal solutions and makes
fair comparison of methods challenging.
Recently proposed ranking-based loss functions, namely
“Average Precision (AP) Loss” [6] and “average Locali-
sation Recall Precision (aLRP) Loss” [27], offer two im-
portant advantages over the classical score-based functions
(e.g. Cross-entropy Loss and Focal Loss [22]): (1) They di-
rectly optimize the performance measure (e.g. AP), thereby
providing consistency between training and evaluation ob-
jectives. This also reduces the number of hyper-parameters
as the performance measure (e.g. AP) does not typically
have any hyper-parameters. (2) They are robust to class-
3009
资源评论



易小侠
- 粉丝: 6606
- 资源: 9万+









最新资源
- 基于Vue、Java、JavaScript和HTML的“久久爱宠”宠物店管理系统设计源码
- 基于Python的Rime输入法配置与使用技巧设计源码
- 基于TypeScript和前端框架的华中科技大学开源镜像站设计源码
- 广东东莞含街道geojson
- 基于MQTT协议的ESP32远程遥控小车
- 适用于 YOLO-Pose 模型的 NVIDIA DeepStream SDK 6.3 , 6.2 , 6.1.1 , 6.1 , 6.0.1 , 6.0 应用程序.zip
- 基于Raspberry Pi的dingdang-robot中文语音对话机器人设计源码
- 基于HTML的ABAP程序设计源码与编程交流平台
- 基于Spring Boot与Mybatis的Java点歌系统设计源码
- 基于Spring Boot的Java-Lib设计源码,全面集成Java和HTML技术库
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


