西门子 S7-1500 与 FANUC 机器人进行 EtherNetIP 通信的具体方法示例
具体方法可参考以下内容:
以下示例中 TIA 博途的版本为 V17,本例中 PLC 做主站,机器人做从站
一、西门子 PLC 一侧的组态设置和编程
首先,我们需要到下载所需的 EtherNetIP 通信库文件,大家可自行百度获取或者从以
下链接获取:
西门子 EtherNetIP Scanner 通信库文件 V17 版本
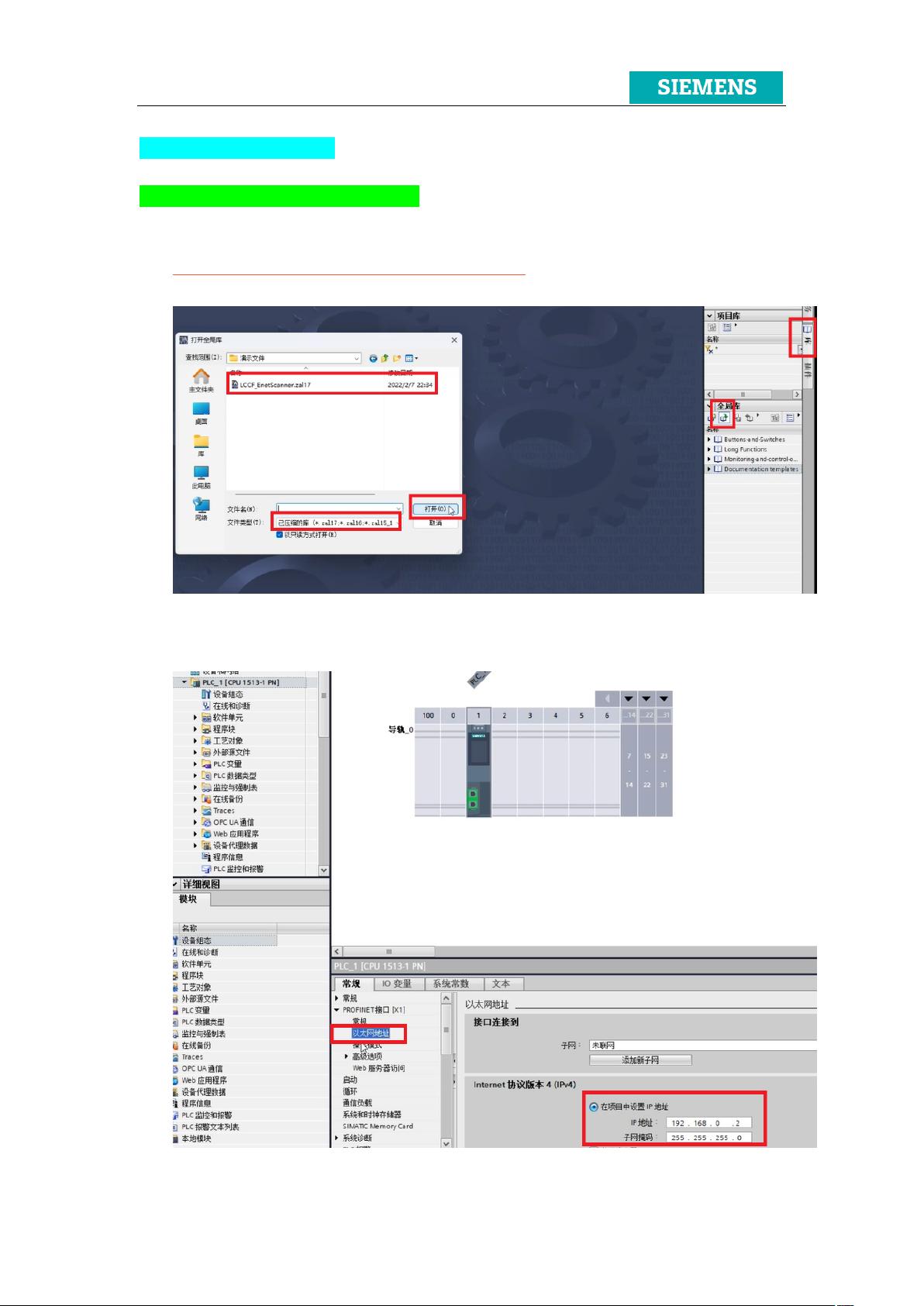
打开博途软件,先将下载好的通信库文件导入,
新建一个项目,添加一个 1500PLC,设置该 PLC 的以太网地址为 192.168.0.2,如下图
所示,














- 1
- 2
- 3
- 4
前往页