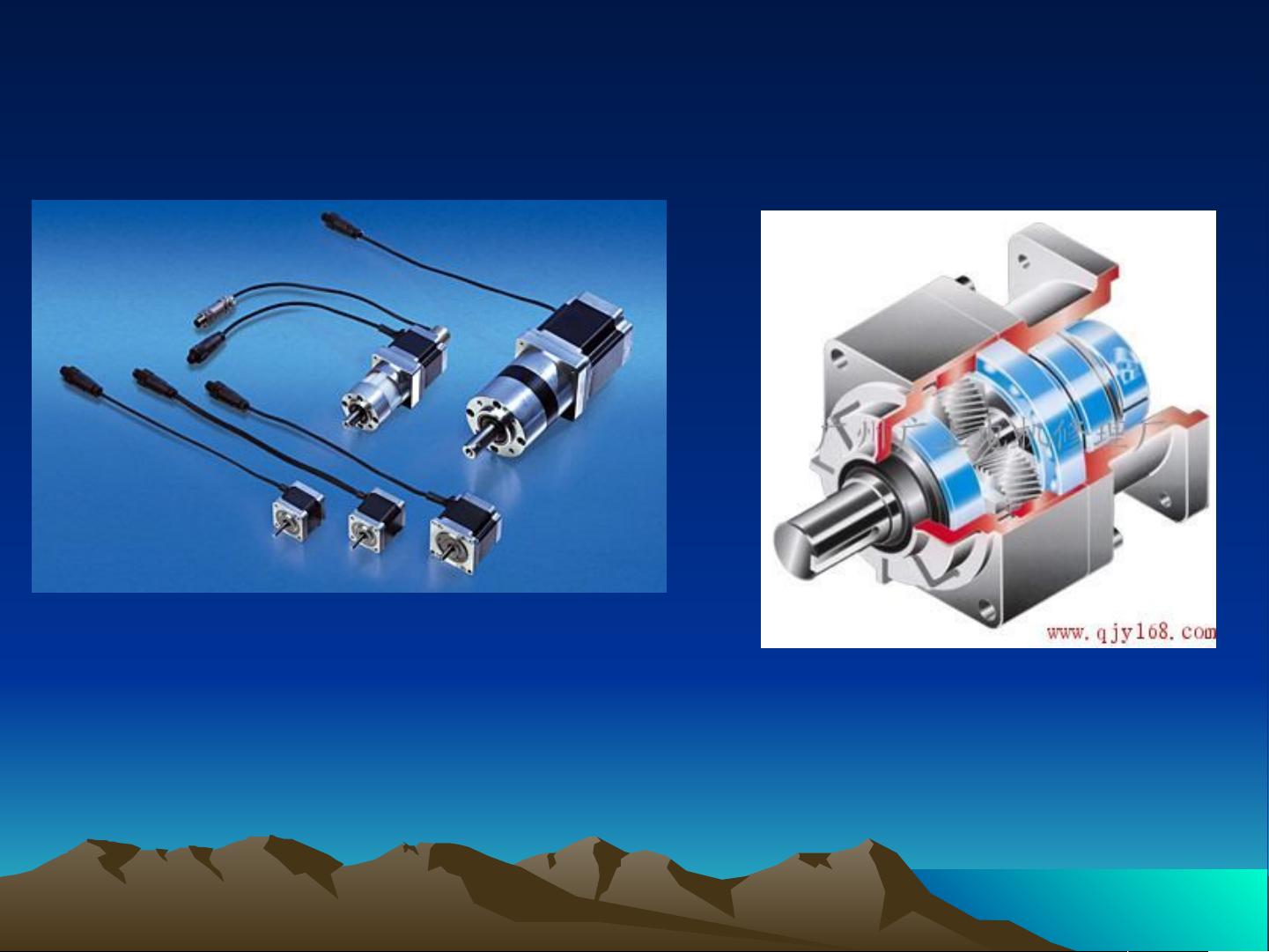
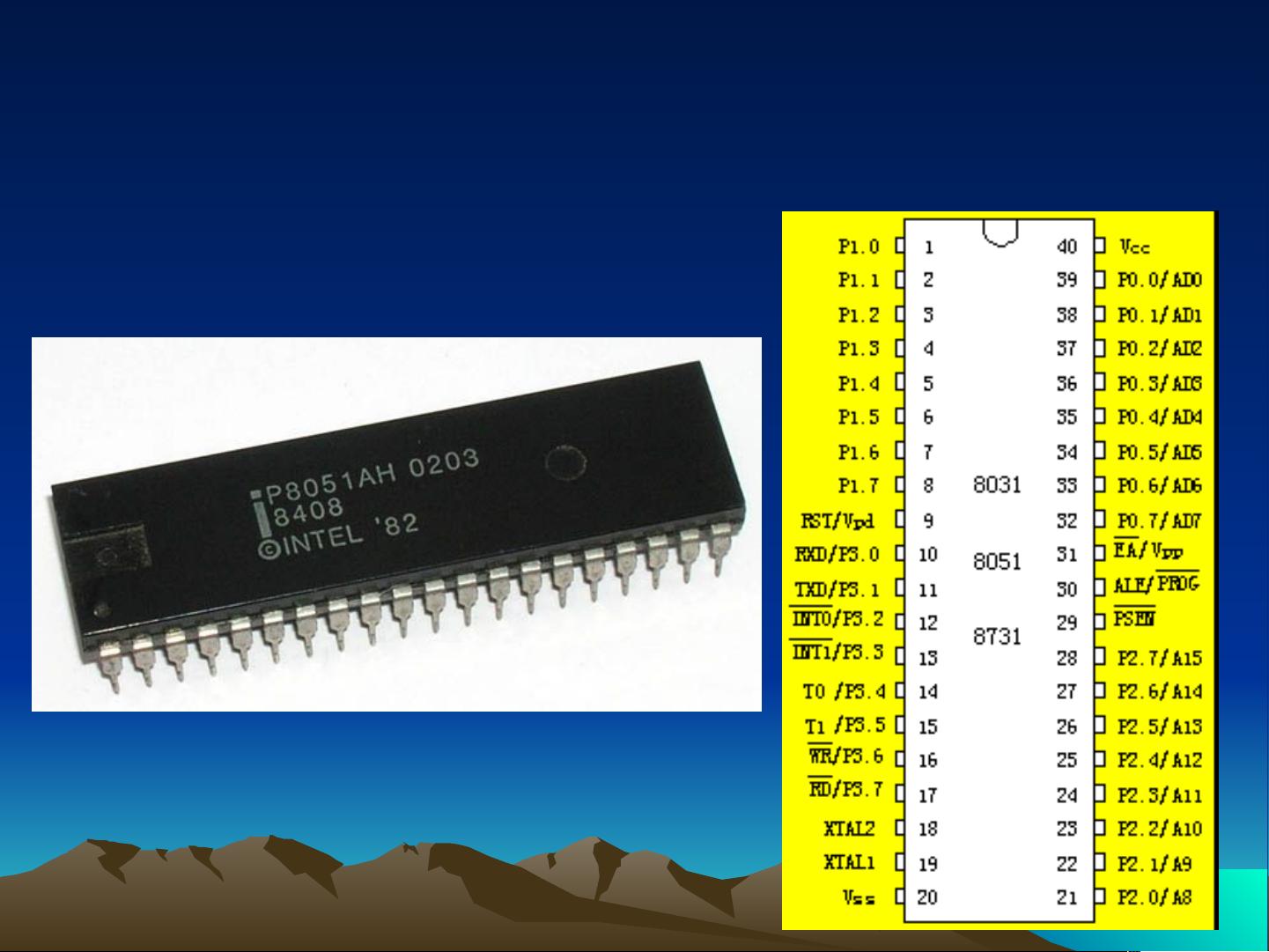
**步进电机控制详解** 步进电机是一种将电脉冲信号转换为角位移或线位移的电动机,常用于精确控制应用。在本PPT中,我们深入探讨了步进电机的控制方法,特别是在MATLAB环境下的分析。步进电机的控制通常涉及到单片机,例如8051系列,以及相关的驱动电路。 ### 1. 单片机控制步进电机 以8051单片机为例,通过I/O口发送控制脉冲到驱动电路,按照预定的通电换相顺序来控制步进电机。P1.0、P1.1和P1.2等I/O口可用来传输控制信号,驱动电机的A、B、C相。这种方法依赖于软件控制,确保电机按照预设的步进角度移动。 ### 2. 调速与驱动电路 8713集成电路芯片常用于与8051单片机的接口,以控制驱动电路。其中3脚接收步进脉冲,4脚决定电机转向。通过改变输入脉冲的频率和顺序,可以实现对步进电机速度的调节。 ### 3. 励磁方式及其传递函数 步进电机有两种常见的励磁方式:单向励磁和两相励磁。 #### - 单向励磁 对于单向励磁,传递函数简化为二阶系统,形式为222)(nnSJDSSGωω+ +=,其中n是电机的自然角频率,J是电动机转子及负载的总惯量,D是粘滞摩擦系数。通过MATLAB模拟,可以分析电机的动态性能,如最高点调节时间和上升时间。 #### - 两相励磁 两相励磁则表现为三阶系统,其传递函数更为复杂,包括电机参数如电感(L)、电阻(R)和惯量(J)。同样,可以通过MATLAB进行时域分析,以获取电机的暂态响应。 ### 4. 系统稳定性分析 无论是单向励磁还是两相励磁,系统稳定性的判断可通过闭环传递函数的极点位置进行。当反馈为单位负反馈时,系统通常能保持稳定。MATLAB仿真可以帮助我们验证系统的稳定性和性能指标,如上升时间、超调量等。 步进电机的控制涉及多个层面,包括单片机编程、驱动电路设计、电机参数分析以及控制系统理论的应用。通过MATLAB这样的工具,我们可以更深入地理解步进电机的工作原理,并优化其控制策略,以满足不同应用的需求。在实际项目中,理解这些基础知识并结合实践操作,能够有效提升步进电机控制系统的性能和精度。
剩余22页未读,继续阅读















评论0