





题 目: 基于 stm32f4 的蓝牙控制小车
关键词: STM32F4 LM2940-5.0 L298N FBT06_LPDB 蓝牙串口通信
android
摘要
“基于 stm32f4 的蓝牙控制小车”是一个基于意法半导体与 ARM 公司生产的
STM32F4 DISCOVERY 开发板的集电机驱动模块、电源管理模块、stm32f4 主控
模块、蓝牙串口通信模块、android 控制端模块。电机驱动模块使用了两个 L298N
芯片来驱动 4 路电机,使能端连接 4 路来自主控板的 PWM 波信号,8 个输入端
接主控板的 8 个输出端口;电源管理模块使用了 LM2940-5.0 芯片进行 12V 到
5V 的转换,12V 用于电机模块的供电,5V 用于蓝牙模块、传感器等的供电;主
控模块采用了 MDK 编辑程序,然后下载到主控板,实现硬件与软件的交互;蓝
牙串口通信模块则是采用了 FBT06_LPDB 针插蓝牙模块,与主控板进行串口通
信,同时与 android 手机进行通信;android 控制端模块是一个集开启蓝牙、搜索
蓝牙、控制小车等功能。用户可以通过 android 控制端进行控制小车的运动,实
现一些用户需要的功能和服务。
1. 引言
蓝牙的创始人是瑞典爱立信公司,蓝牙技术是一种无限数据与语音通信的开
放性全球规范,它以低成本的近距离无线连接为基础,为固定与移动设备通信环
境建立一个特别连接。手机之间通过蓝牙实现数据共享成为常理,将手机变为遥
控器为人们的生活带来无限方便。遥控小车在工业、国防、科研等领域应用越来
越广泛,例如说:消防遥控小车、探测小车等。本文详细阐述了使用蓝牙通信的
手机遥控小车前行、倒退、左转、右转和停止等功能的软硬件设计过程。
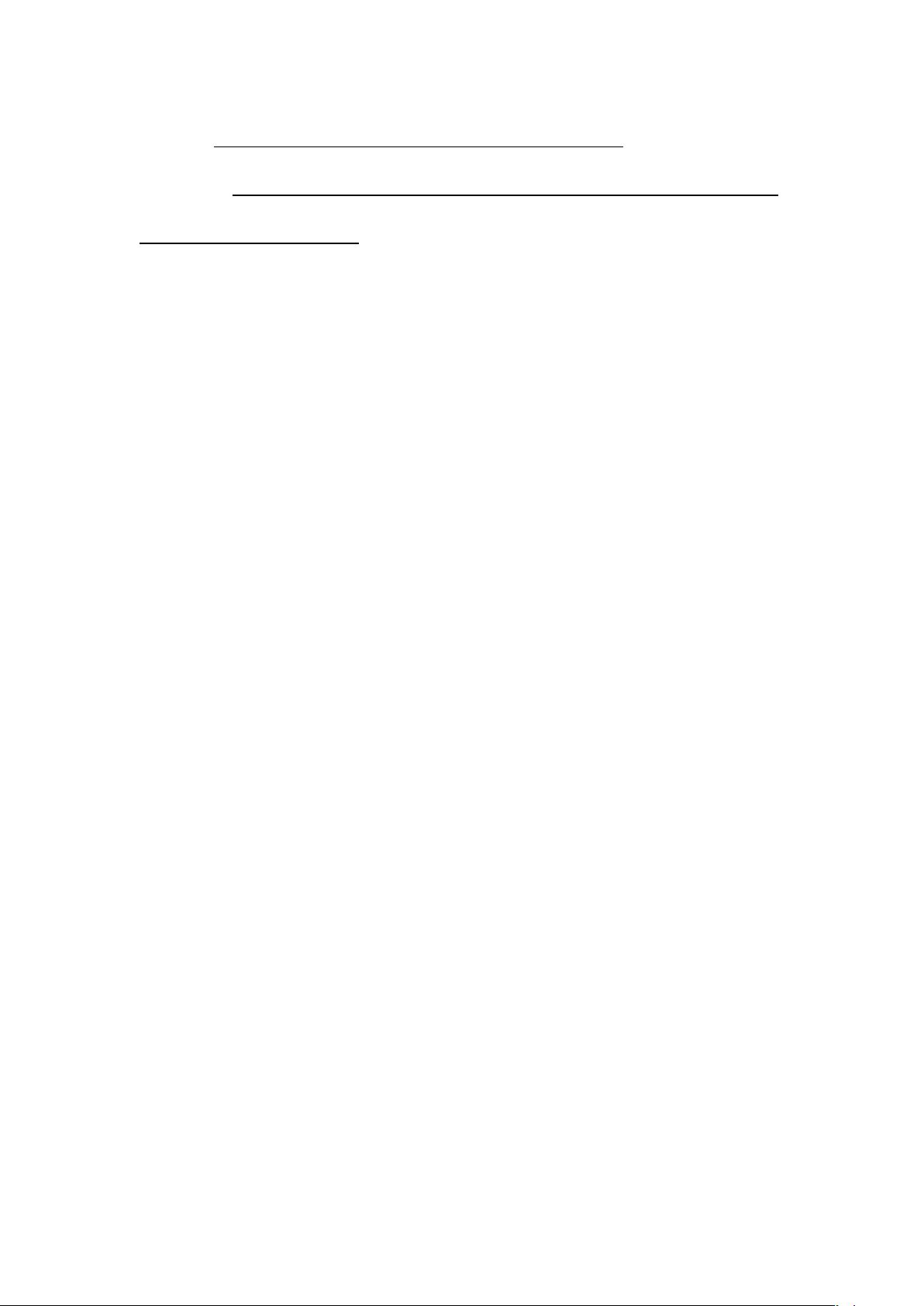
2. 系统方案
该系统分为电机驱动模块、电源管理模块、主控板、蓝牙通信模块、android
控制端等 5 个模块,如图 2.1 所示:
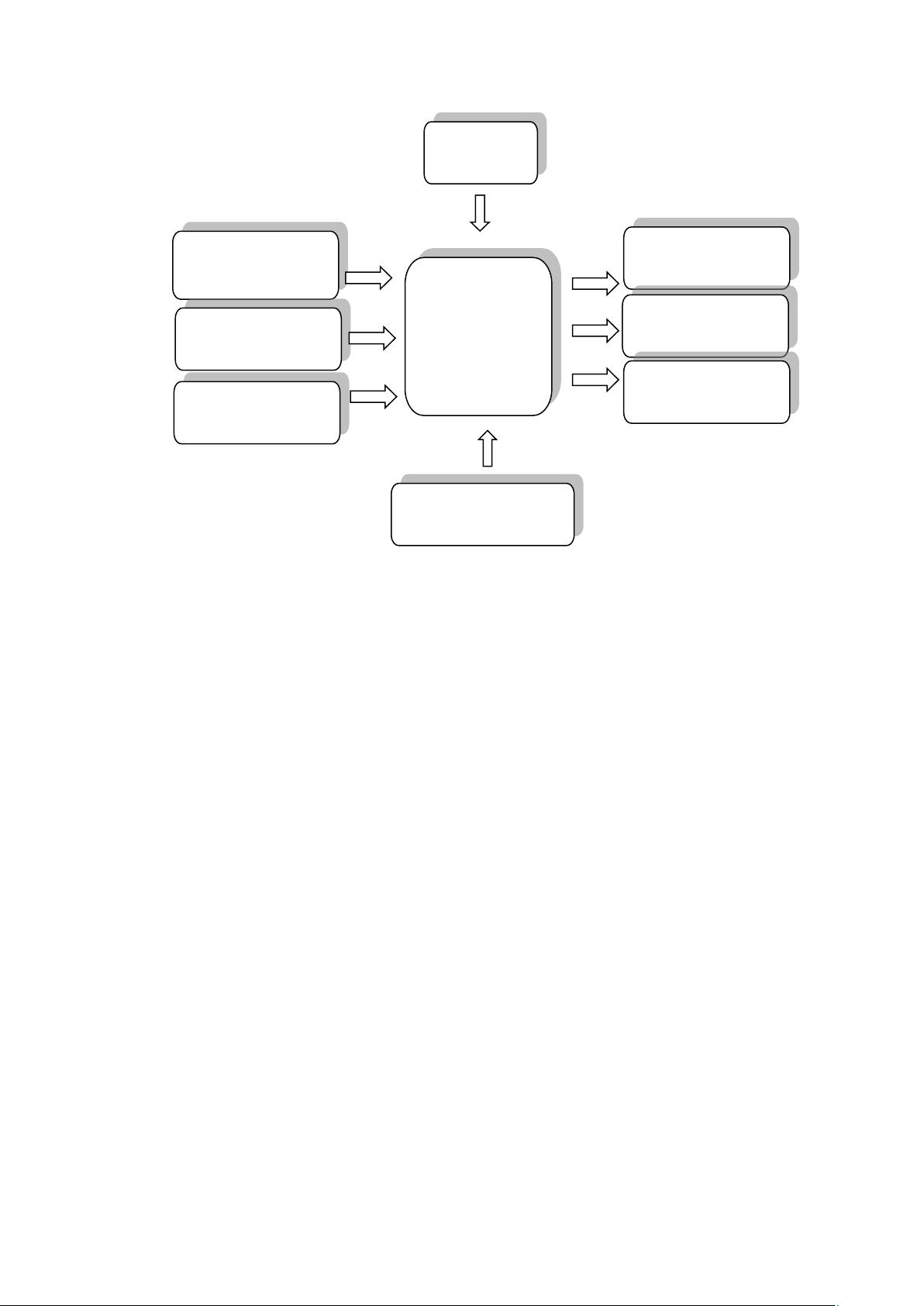
图 2.1 系统模块图
3. 系统硬件设计
3.1 电机驱动模块
3.1.1 L298N 的封装
H 桥电路虽然有着诸多的优点,但是在实际制作过程中,由于元件较多,电
路的搭建也较为麻烦,增加了硬件设计的复杂度。
由于 H 桥电路有诸多的优点,但是在实际制作过程中电路又比较麻烦,因此
在本设计中我们采用 H 桥集成电机驱动芯片 L298。L298N 的工作原理和以上介绍
的 H 桥相同,引脚图如图 3.1 所示:
stm32f4
主控板
电源管理
模块
超声波测距模块
蓝牙通信模块
GPS 导航模块
其它待扩展模块
音频输出
电机驱动模块
指示灯

图 3.1 L298N 封装图
3.1.2 L298N 的原理图设计
L298N 是 ST 公司生产的一种高电压、大电流电机驱动芯片。该芯片采用 15
脚封装。主要特点是:工作电压高,最高工作电压可达 46V;输出电流大,瞬间
峰值电流可达 3A,持续工作电流为 2A;额定功率 25W。内含两个 H 桥的高电压
大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感
性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影
响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在
低电 压下工作;可以外接检测电阻,将变化量反馈给控制电路。使用 L298N 芯
片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两
台直流电机。L298 的参考电路图如图 3.2 所示。
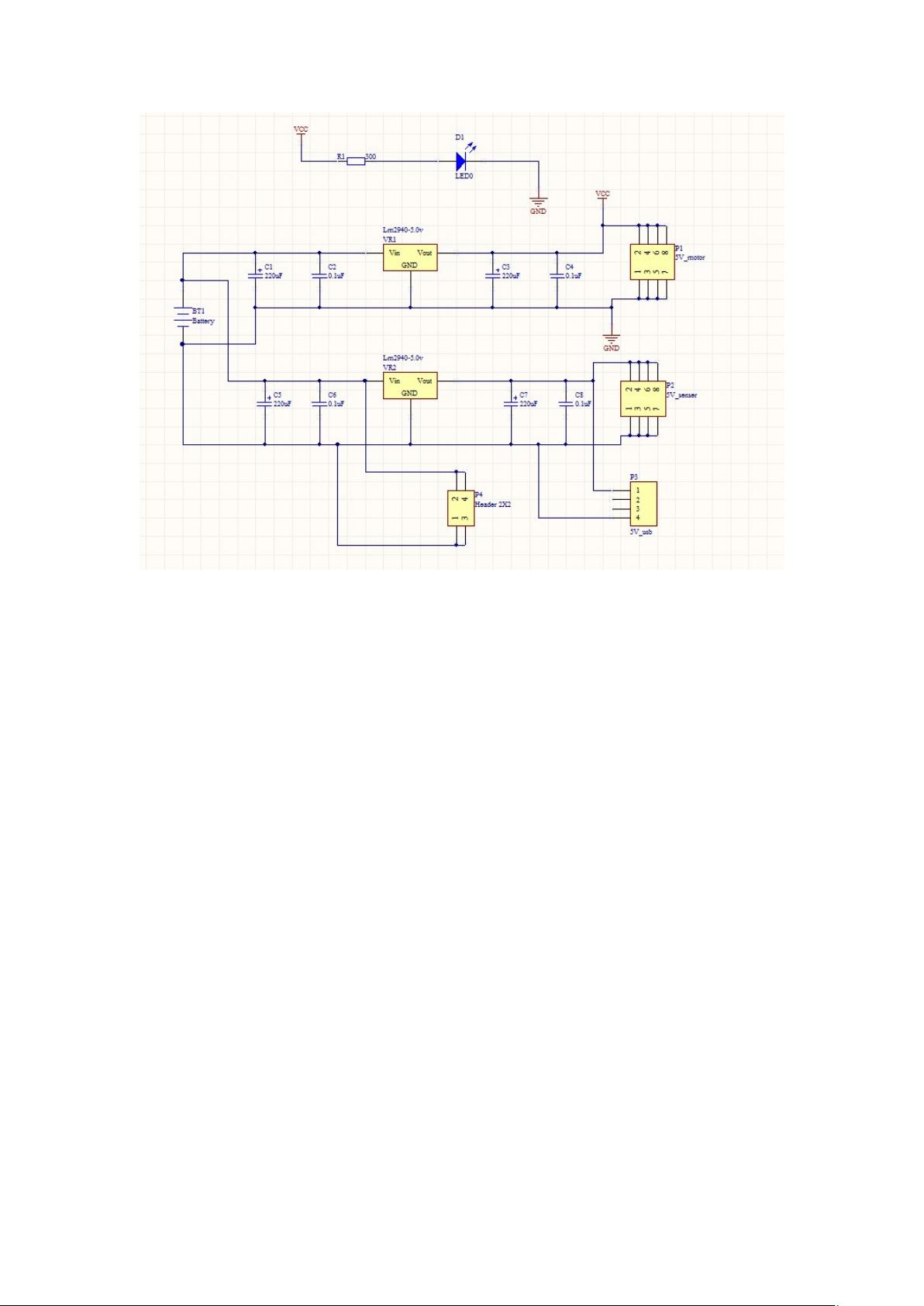
图 3.2 电机驱动电路原理图
3.1.3 电机驱动模块实物
1、控制板内部带 5V 逻辑电平转换芯片,不需要额外的 5V 供电。
2、如果 EN1、EN2、EN3、EN4 不接 PWM 调速信号,次脚需要和对应的管教短接。
3、GND 和 12V 接电机电源,其中 12V 可以接 7V--24V 电平,板子上的电源开关
只是控制逻辑 5V 电平的开关,L298 的 12V 电源不受此开关控制.
4、输出端和输入端一一对应,当输入端为 5V 时,输出端也为高电平,输入端为
低电平时输出亦为低电平。













