

多波束水深测量数据处理及思考
顾顺隆(上海海事局海测大队)
摘 要:根据多波束测深及其辅助传感器测量原理,对多波束数据处理方法进
行了探讨,并对各种误差影响进行了思索。
关键词:多波束 坐标系 传感器 系统偏差 归算 误差
1 前言
随着科技的发展,水深测量方法已经从测杆、测绳测深发展到超声波测深 ;
从电火花测深记录纸模拟输出到数字化输出、断面图像文件 (无纸化)输出;从
单波束线测深发展到多波束面测深;从六分仪定位发展到 GPS 定位;从人工测
量方式发展到自动化数据采集。伴随着测深技术的进步,我们的测量能力和测
绘成果的质量得到了空前提高。
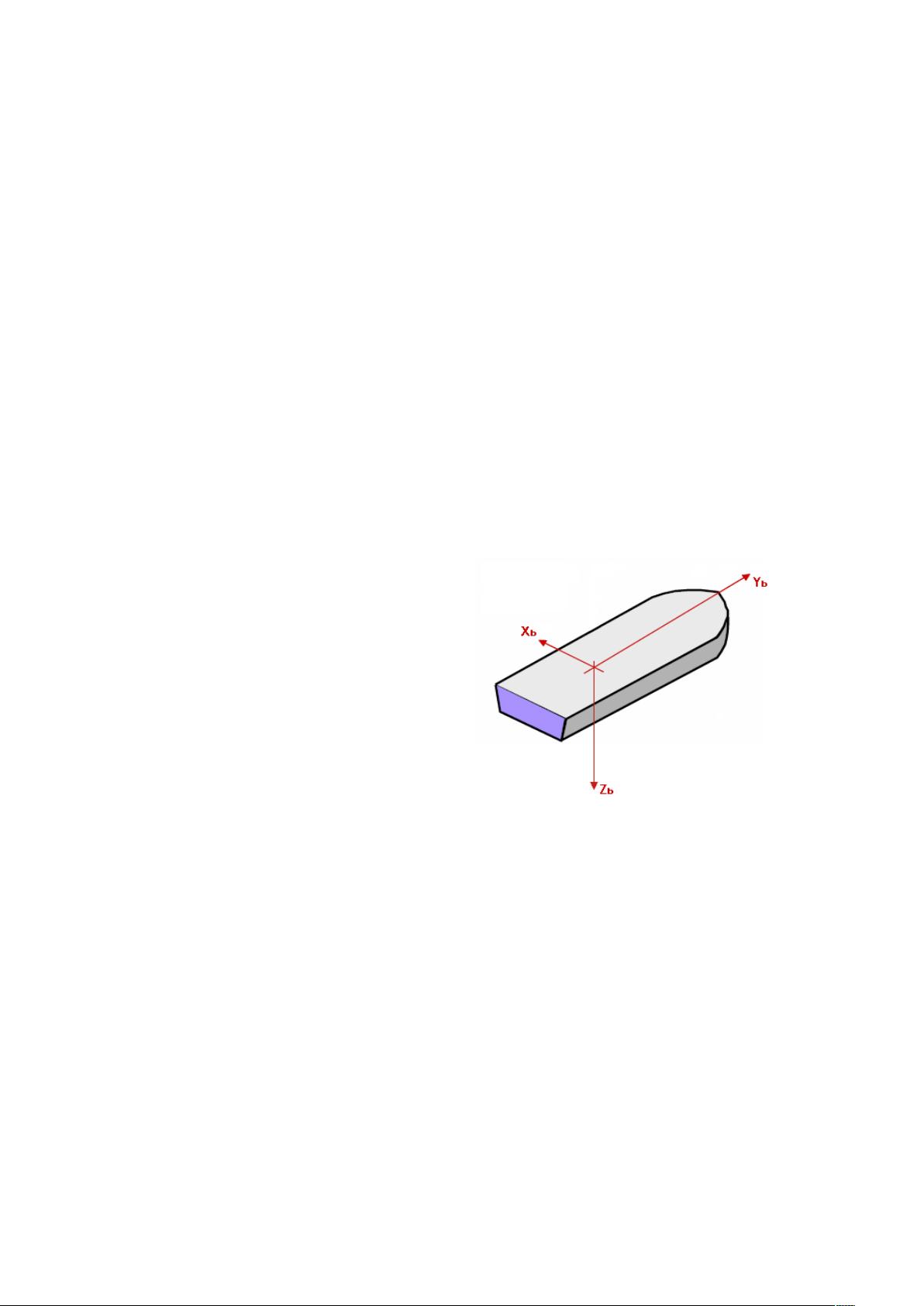
多波束测深仪是单波束测深仪的发展,其显著特点是能一次发射和接收一
列波束,在测量船速等控制得当的情况下,多波束测深仪可以对一个区域进行
全覆盖的面测深,这是对单波束测深技术的巨大改进。多波束测深技术的应用,
不仅提高了外业测量的作业效率,同时也提高了野外探测能力;不仅为水深测
量提供了方便,也为沉船或沉物的寻找、暗礁或浅点的探查提供了方便。
随着多波束测深技术的全面推广应用,大家赞叹着技术进步带来的便利,
但同时也出现了一些令人疑惑甚至令人担忧的问题,需要从实践和理论两方面
进行分析研究,如,单波束测深仪或旁侧声呐测到的某些目标,多波束却未能
测出。问题的存在,引人思考:面对技术进步,不仅要引进新技术,还要能够
- 1 -
剩余19页未读,继续阅读
资源评论

 whatlovenba2013-11-27不是我要找的东西,但是里面的内容值得学习
whatlovenba2013-11-27不是我要找的东西,但是里面的内容值得学习 u0107413042014-07-07资源很好,有用
u0107413042014-07-07资源很好,有用- qqiuqqiu2018-05-17文件打不开……
dc1233
- 粉丝: 2
- 资源: 4









最新资源
- iPicker-javascript
- 十字形声子晶体能带及传输特性
- comfyui-comfyui
- JeeSite Vue3-vue
- gitschool-linux常用命令大全
- cdroid-android
- PrimiHub-git命令
- dynamic-tp-can
- rubygem-rbvmomi-vmware
- gtmsAutoTestProject-conda创建新环境
- PhalApi-sql server
- 分布式驱动电动汽车十四自由度动力学模型综合了车辆的操纵模型和平顺模型,自由度包括四个车轮的垂向跳动和四个车轮绕旋转轴线的滚动,车体的六个自由度,包括在车体坐标系内的x,y,z的平动和绕x、y、z轴的翻
- ansys钢管混凝土拱桥建模教程 视频共计200分钟,纯干建模教程,值得科研迷途中的你入手学习 模型介绍:本实例为一下承式钢管混凝土系杆拱桥,跨度125m,拱矢高25m,拱轴系数1.1,拱肋为一哑铃型
- Comsol等离子体仿真,空气棒板电晕放电,23种精简空气反应
- Comsol等离子体仿真,Ar棒板粗通道流注放电 电子密度,电子温度,三维视图,电场强度等 5.5,6.0版本
- 太阳能光伏并网逆变器系统设计,输出与电网同相,输出380v50hz,并网效果良好 最大功率追踪采用电导增量法,前极采用双向boost升压电路,后极三相桥式逆变 控制环采用双环PI调节 逆变器采用三相
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


