
控 制 器
伺服放大器
电液伺服阀
液压缸
位移传感器
液压 APC 系统数学模型
液压自动位置控制系统(液压 APC)是由位移传感器测量液压缸位移或是
轧辊辊缝位移构成的闭环反馈控制系统。液压 APC 是一个高精度、高响应的电
液位置闭环系统,它的任务是接受 AGC(Automatic Gauge Control)系统
的指令值,进行压下缸的位置闭环控制,使压下缸实时准确地定位在指令所要
求的位置,达到设定和控制空载辊缝的目的。它是液压 AGC 的执行系统,也是
整个 AGC 系统的基础,其性能指标直接决定着 AGC 的指标,是 AGC 的核心。
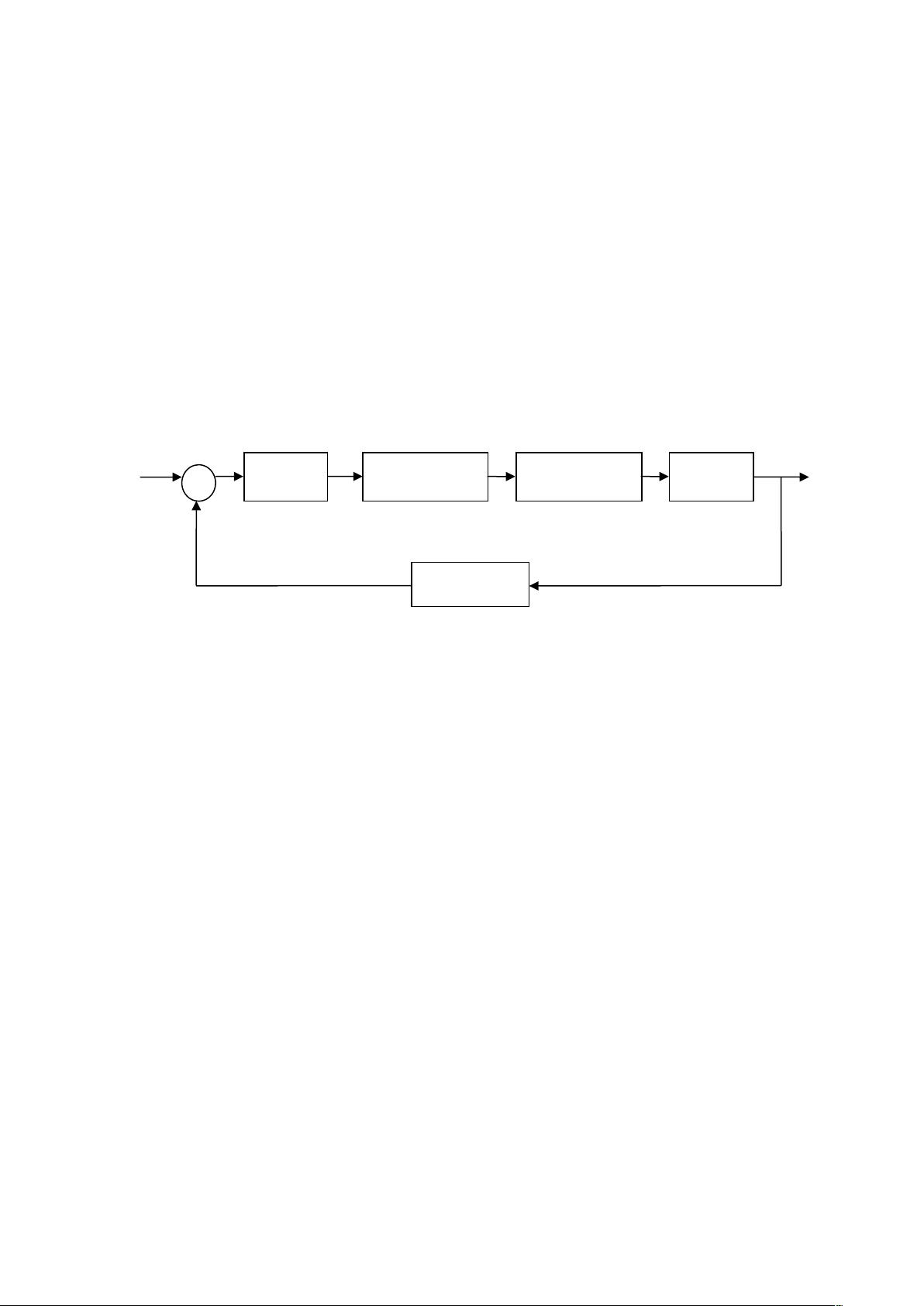
其系统组成如图 1.1。
给定值 位移
+
—
图 1.1 液压 APC 系统控制框图
如图 1.1 所示,液压缸体相对于活塞的位移通过位移传感器检测出,在实
际系统中,为了消除活塞相对于缸体摆动的误差,位移传感器在缸体两侧安装,
传感器分别固定在缸体和与活塞相连的挡板上,去其平均值作为实测位移值。
位移传感器检测出来的电压信号反馈送给位置设定值的输入端,与给定的设定
值信号比较,得出的电压误差信号通过控制器进行调节,然后经过伺服放大器
进行放大并转换成电流信号输送给电液伺服阀。系统中的电液伺服阀直接安装
在压下缸上,伺服阀获得电流信号后输出负载流量给压下缸,压下缸便输出一
定的位移,直到位移传感器的实测值与设定值相等为止。这就是液压 APC 系统
闭环控制的过程。
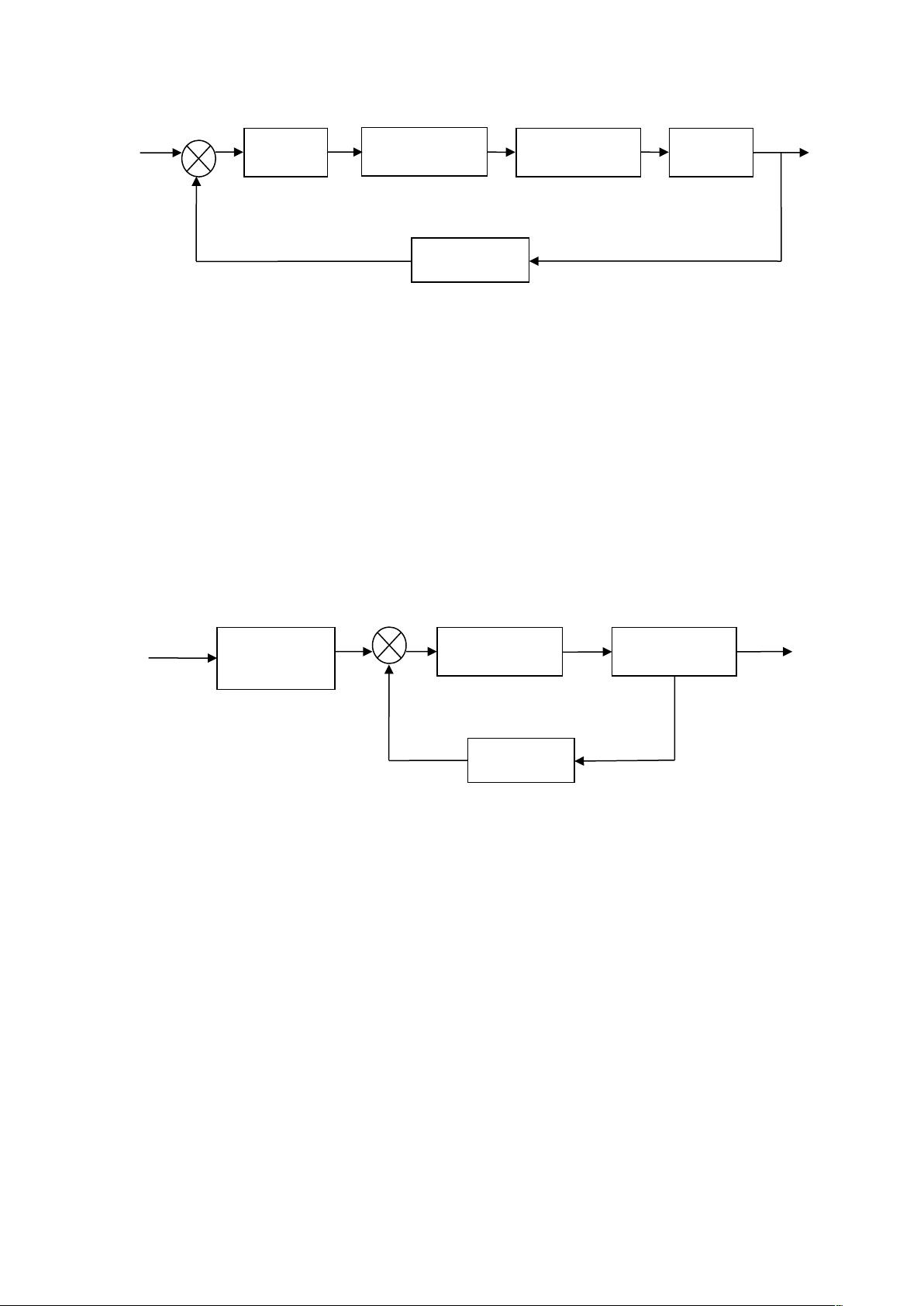
典型液压 APC,即电液位置伺服系统主要由控制器、伺服放大器、电液伺
服阀和位移传感器几部分组成。电液位置伺服系统的结构框图如图 所示。
剩余18页未读,继续阅读
资源评论













