

深圳市春天模型电子有限公司
TEL:+86-755-2974-9810 FAX:+86-755-2974-9779 http://www.springrc.cn
Page 1 of 49
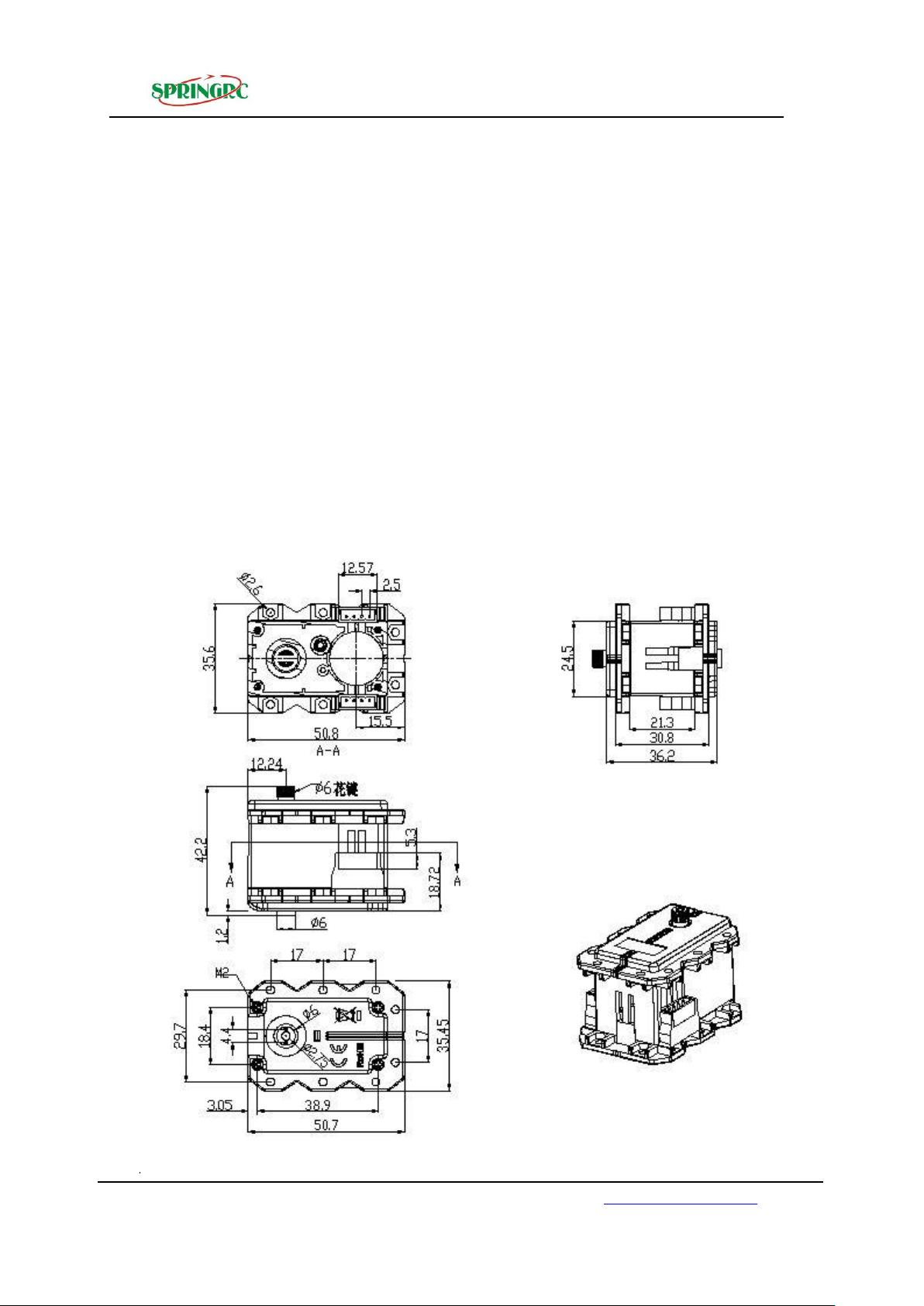
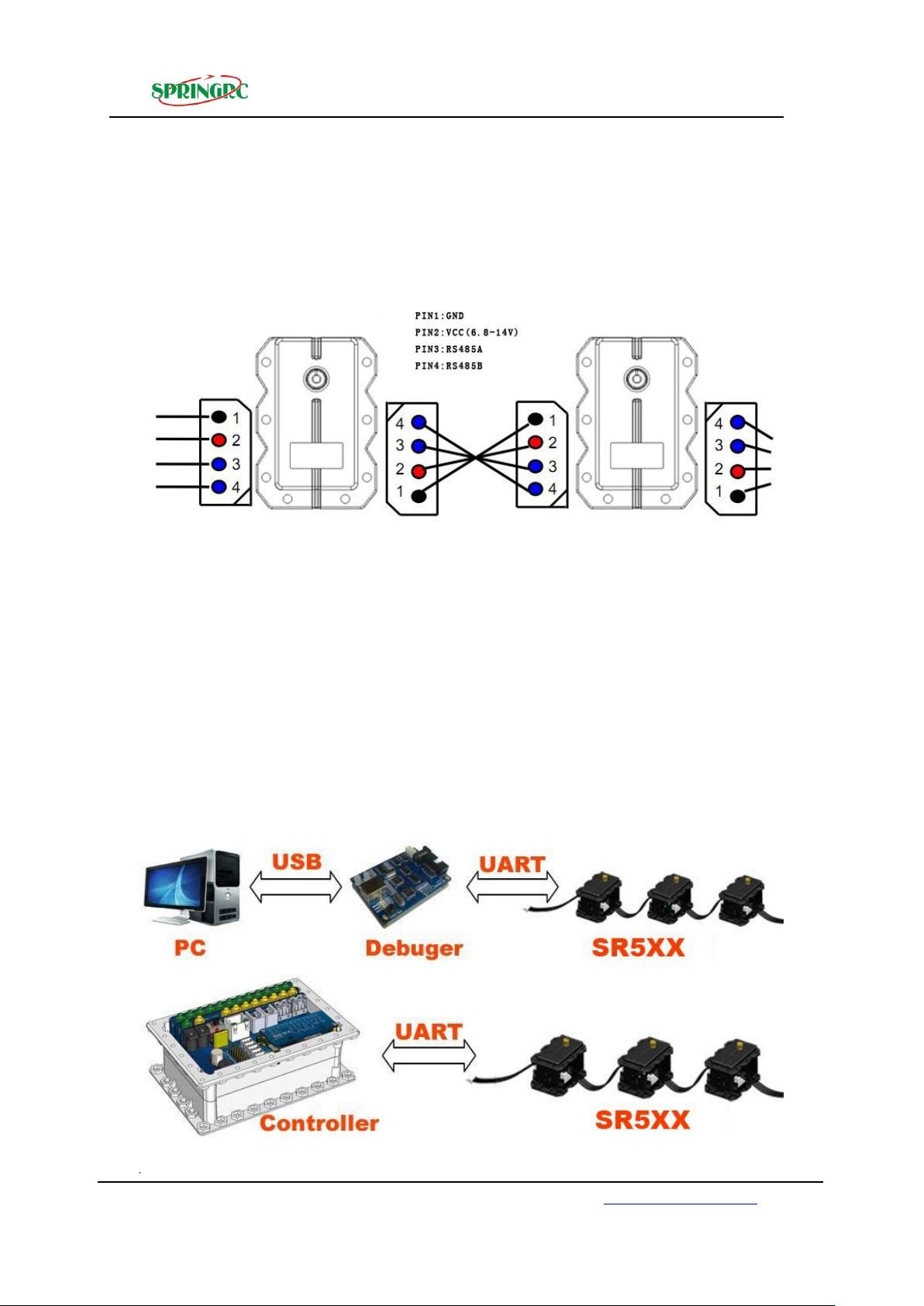
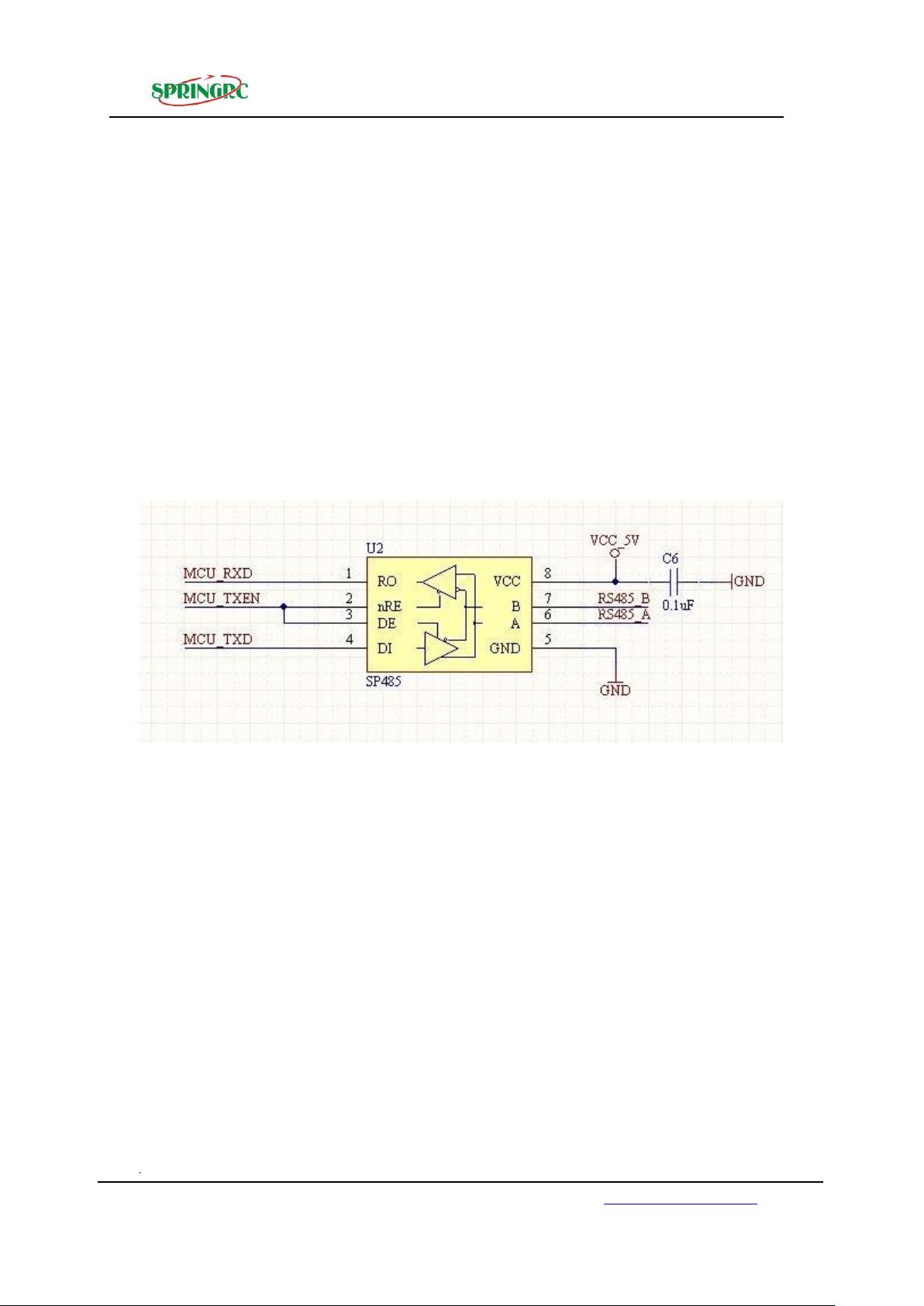
机器人舵机 SR518 用户手册
剩余48页未读,继续阅读
资源评论

 kathydong2016-03-03不错,很有帮助!
kathydong2016-03-03不错,很有帮助!- aloevera2016-06-10不错 谢谢 学习了

Duanxx
- 粉丝: 504
- 资源: 51









最新资源
- 使用Python语言实现二分查找代码.zip
- 内网域渗透小工具.zip
- 神经网络初学者基础入门
- X光手部小关节分类数据集(基于骨龄计分法RUS-CHN)
- 关于android安全,android渗透测试,android逆向 关于安卓渗透、安卓逆向相关.zip
- 云硬盘初始化数据盘-初始化windows数据盘详细操作步骤文档
- 招商银行2020FinTech精英训练营数据赛道《基于用户标签数据、交易行为数据构建信用违约预测模型,预测评分数据集中每个用户的违约概率》+源码+文档说明
- 全自动化的渗透测试脚本暂未公布最新版,最新版功能更贴切实战攻击.zip
- C#.Net Core学校管理系统源码数据库 SQL2012源码类型 WebForm
- Web网页设计期末大作业-我的家乡静态网页设计与实现源码(95分以上项目)
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


